来源:汽车维修技师 作者:佚名 2021-03-09 10:40:48
故障总结:为啥该车的方向盘不正会导致车辆行驶时
跑偏呢?这个需要从该双齿轮电子助力方向机的特点来说起,该车
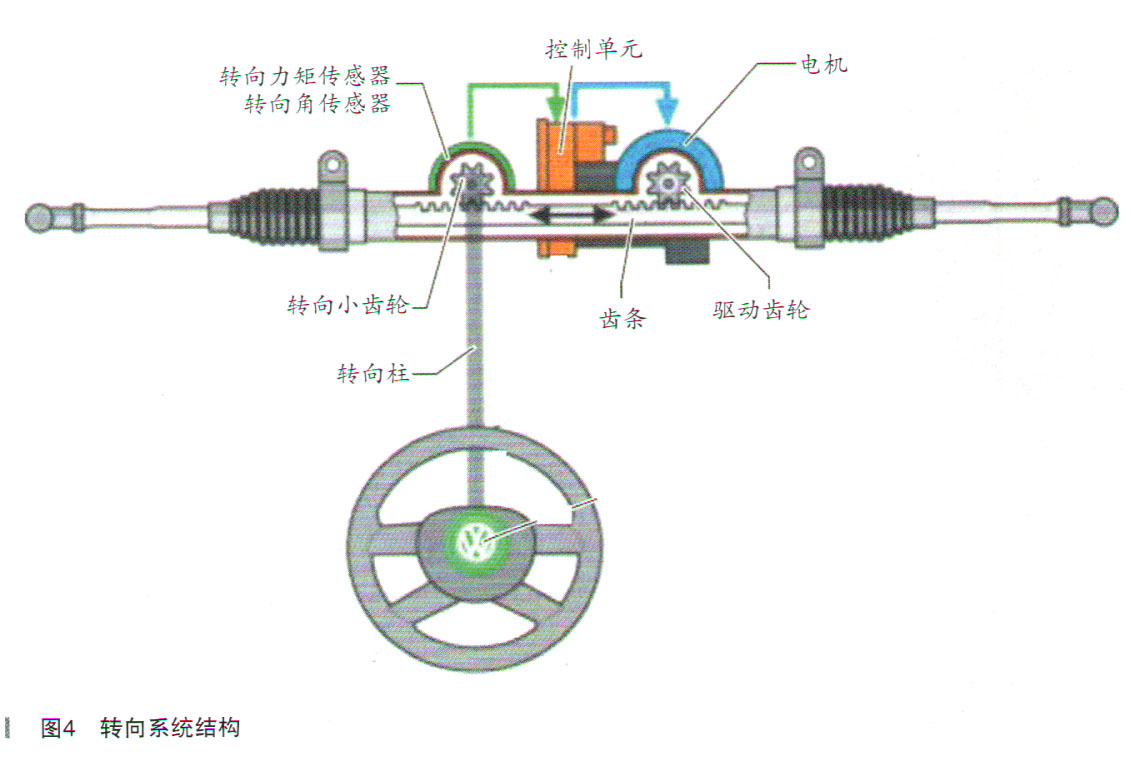
转向系统结构如图4所示,双齿轮转向机上集成了控制单元、转向力矩传感器和
转向角传感器、电机,以及转向小齿轮和驱动齿轮等,其中转向小齿轮由方向管柱带动,而驱动齿轮由电机驱动后再推动齿条,为转向提供助力。该转向机优点包括:①按需提供转向助力,也就是由行驶条件决定是否提供转向助力,在不操纵方向盘时不提供助力,也不会消耗能量;②在“主动回位”功能下支持
转向系统回位到正前行驶位置。这可以在任何行驶状态下提供出色的正中感觉和格外精确的线性导向;③当车辆处于持续侧风冲击或倾斜的路面上时,正前行驶修正功能将产生一个助力力矩,减轻驾驶员在正前行驶时的负担。所以该方向机最大的优点是方向机能主动介入修正行驶方向,确保车辆处于正前方向行驶。但对于控制单元而言,是如何界定车辆是否处在正前方向行驶呢?这个就涉及方向机的零位,即方向机的中间位置,一般来说,方向机零位到两端的极限位置角度基本接近,本车左边方向到底为490.3°,右边打到极限位置为-489°,相差角度大约在1°左右,已经属于非常中间的位置了,而控制单元正是以这个零位作为车辆正前方行驶的坐标点,当车辆行驶过程中,在驾驶员没有主动操纵方向盘转向的情况下,如果
转向角传感器偏离零位,则电机会驱动小齿轮,将方向往零位方向修正,该车正是在轮胎正前方向行驶时,方向机零位偏离了28.8°,电机才会驱动小齿轮带动齿条往右侧运动,结果形成了车辆行驶中的往右
跑偏趋势从而导致车辆的
跑偏。
第二个故障现象是低速行驶颠簸路面ESP介入工作,又是什么原因所导致的呢?这个从ESP工作原理来看:电子稳定程序属于车辆的主动安全,也可称之为动态驾驶控制系统,简单地说它是一个防滑系统。ESP能够识别车辆不稳定状态,并通过对制动系统、发动机管理系统和变速器管理系统实施控制,从而有针对性地弥补车辆滑动。因此,ESP在输出控制的时候,需要采集车辆的动态数据,包括加减速、偏航率、侧向和横向加速度等;还需要知道驾驶员的意愿,包括行驶方向(直线行驶还是左右转弯)、期望速度及期望减速等数据,而行驶方向是通过
转向角传感器来知晓,在该车故障出现ESP灯闪烁时,虽然车辆为正前方行驶,但是方向机控制单元检测到的转向角度为28.8°,也就是说方向机控制单元认为车辆处在向左侧转弯的状态,再加上颠簸路面导致轮胎与地面附着力变化,ESP认为车辆处在不稳定的转弯状态而介入工作,避免车辆侧滑产生风险。当然如果
转向角传感器损坏信号丢失,则ESP无法判断车辆的行驶方向而完全失去作用了。
上一页 [1] [2]





