・上一文章:奔驰C200轿车行驶时ESP停止运作
・下一文章:2016年大众新桑塔纳EPC报警且加速无力
随着社会经济的发展和交通物流的多样化,汽车已经深入人们的生活。汽车电气系统的出现,极大地提高了驾驶员的行车舒适性和安全性。倒车雷达系统的配备,提高了驾驶员在泊车行驶的安全性。本文就倒车雷达系统的工作原理进行分析,让大家对此系统有更深入的认识。
1.倒车雷达系统分类
倒车雷达系统由于车型定位、成本造价、整车网络架构等因素的影响,分为以下几种方式:
(1)有单独控制器,无网络通信协议。
(2)有单独控制器,使用CAN网络通信协议。
(3)无单独控制器,使用LIN网络通信协议。
(4)无单独控制器,使用LIN和CAN网络通信协议。
2.倒车雷达系统工作原理介绍
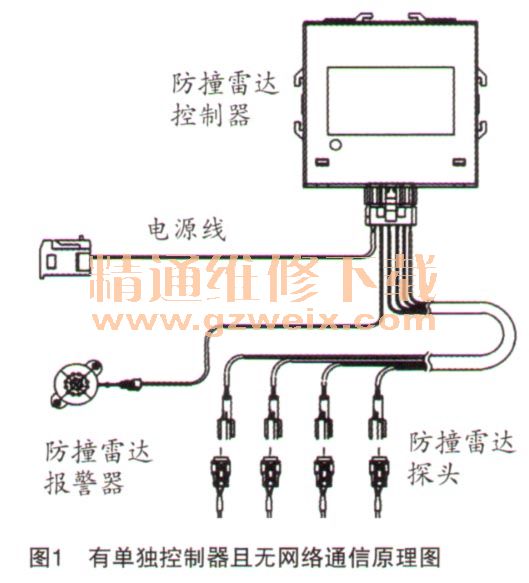
(1)有单独控制器,无网络通信协议
倒车雷达系统山雷达探头、控制器、蜂鸣报警装置或显示装置组成,各元件之间的连接通过硬线通信。探头与控制器之间通过硬线连接,每个探头之间有单独的电源搭铁或者共用电源搭铁。单独探头损坏不影响其他探头的正常工作。
具体原理:控制器接收倒挡开关信一号后工作,驱动雷达探头探测障碍物,计算探头与障碍物的距离,到达报警距离后控制蜂鸣报警器工作。蜂鸣报警器一般集成在控制器内部,或者单独安装在驾驶室内,通过硬线与倒车雷达控制器连接。若有显示装置,则通过波段显示障碍物的远近距离。该车型没有显示装置,只有蜂鸣报警装置提醒驾驶员障碍物的距离信息,蜂鸣器集成在倒车雷达控制器内部。系统工作原理图1所示。
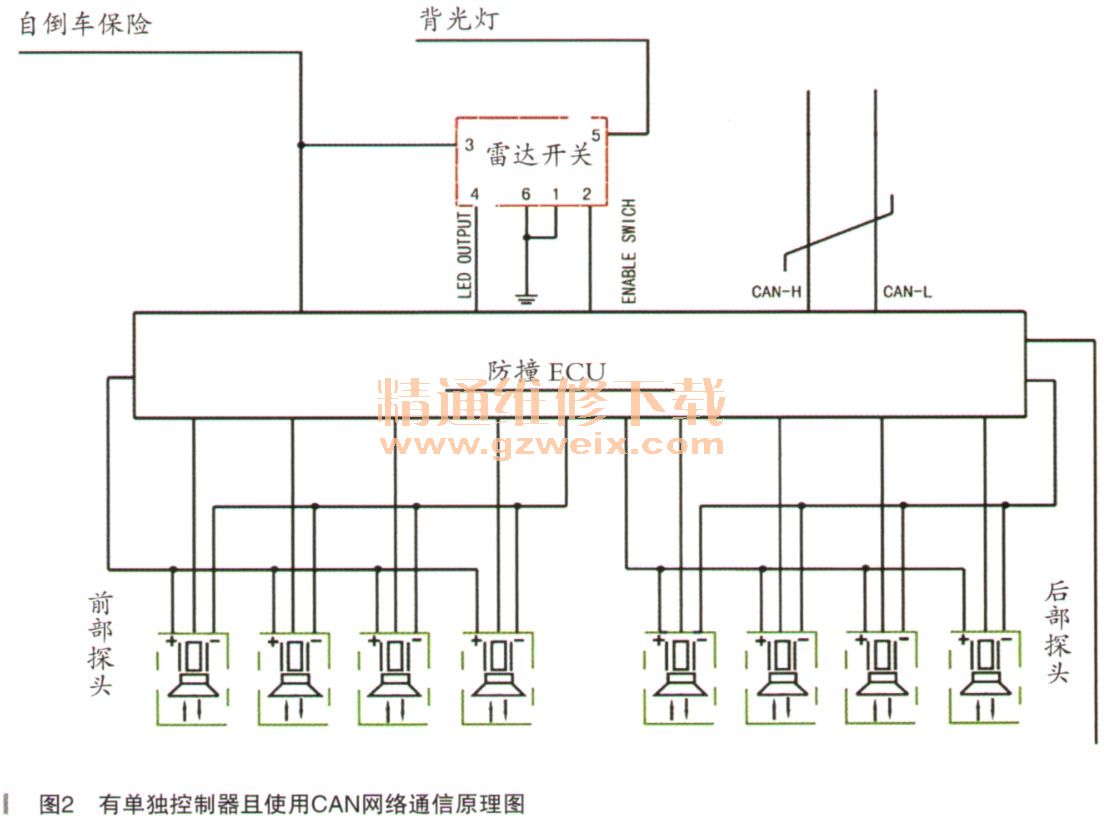
(2)有单独控制器,使用CAN网络通信协议
倒车雷达系统由雷达探头、控制器、雷达开关、CAN网络架构组成。探头和雷达开关与控制器之问通过硬线连接,探头之间共用电源或搭铁,单独探头损坏有可能影响其他探头的正常工作。控制器通过CAN网络架构与其他模块通信,此系统中不存在单独的蜂鸣报警器或者倒车障碍物距离信息显示装置。
具体原理:控制器接收倒车保险的供电进行上作,通过硬线驱动探头探测障碍物;或者由单独的雷达开关控制倒车雷达系统的工作,方便在车辆前行的过程中提供泊车辅助信息提示。控制器将计算后的障碍物距离和报警信息通过CAN网络发出,CAN总线遵循标准为ISO 11898-2,通信速率500Kbps。多媒体通过CAN网络接收倒车雷达距离信息进行显示,组合仪表通过CAN网络接收倒车雷达蜂鸣报警信息进行蜂鸣报警。控制器同时通过CAN网络接收车辆的状态信息,如驻车开关;若车辆当前处于驻车状态,挂入倒挡或者单独操作雷达开关,倒车雷达控制器将不会提供报警,也没有障碍物的距离信息提示。系统工作原理如图2所示。


")


