・上一文章:PCB制造中防止缺陷的方法案例
・下一文章:LED路灯节能监控系统的设计
1.3 控制器电路
由于主控制器的任务较多,电路要求引脚较多,且显示器的控制程序较为复杂,我们单独配备了一个同样的单片机作为主控制器的辅助部分,通过它来分担主控制器的工作,来完成显示部分的工作。其中主控制器与其它模块的连接如图5所示。

1.4 声光报警电路
声光报警模块主要应用于搜救报警电路中,同时为进一步扩展应用,我们在控制其开关的同时引入另一条信号线实现了对声音的控制。寻找硬币我们采用金属探测传感器,当发现金属时,其信号线上电平从低电平变为高电平,触发单片机中断,在单片机的控制下机器人停止运动,启动音乐发生模块并点亮LED进行声光报警,具体实现电路如图6所示。
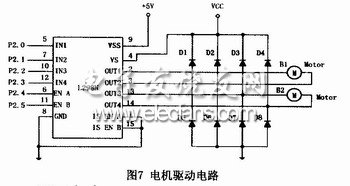
1.5 电机驱动电路
单片机通过传感器的反馈信号控制电机正转、反转或者停止,来实现控制机器人完成各种动作。L298N是专用电机驱动芯片,他可以实现电机的正反转、刹车、PWM调速等多种功能,是对机器人电机进行控制的比较理想的芯片,因此我们采用L298N芯片对两个普通电机进行控制。L298N芯片信号电源与驱动电源的分开,可以根据需要对电机的电压进行调节,其驱动电路如图7所示。
1.6 显示电路
采用MSl602C-1型LCD显示相应的信息。此显示器模块的工作电压为5V左右,支持显示2行字符,每行可显示16个字符,每个字符由5×7点阵显示。
由于主控制器的单片机任务较多,电路接线较复杂,我们采用单独的单片机控制显示模块。
2 智能救援机器人的软件设计
本智能救援机器人的软件控制部分采用C语言编程,借助C语言的强大功能来实现单片机AT89S52的控制功能。主程序流程图如图8所示。

3 结论
以AT89S52单片机为核心部件,利用红外传感检测、电机控制等技术,通过各种方案的讨论及尝试,再经过多次的整体软硬件结合调试,不断地对系统进行优化,最后智能救援机器人可以实现;避开障碍物,并寻找到合适的路径;顺利通过受损的桥梁,并能较准确地测出桥梁的高度;自动识别路线状况,并根据实时状况快速做出判断,准确控制机器人的转向;自动显示所要求的信息;自动寻线前进,能智能检测、捡起、放下硬币;声光报警,并有彩灯闪烁;行驶到规定的地点自动停止并显示救援结束。





