・上一文章:嵌入式系统中从串配置FPGA的实现
・下一文章:QPYD系列液晶显示控制板接口技术及测试程序
本文介绍的这种简单而又功能强大的漫游机器人的建造方法。可以认为,是建造任何更高级机器人的基础。
你可以在造好的机器人上安一个用直流电控制的真空吸尘器,然后让他在起居室里自由活动。而清洁地毯的实际效果决定于驱动机器人的控制电路或计算机的复杂程度。
你还可以给机器人装上光和声音传感器,给它提供察觉潜在的问题的“眼睛”,有些用于家庭防盗系统中的传感器本来就是做这些工作的,而你的任务只是把他们和机器人的电路连在一起。相似的传感器如果装在你的漫游机器人身上,可以自动地在你的家里、办公室、库房、或其它封闭区域巡视,及早发现火情的光、热和烟。机器人携带的电子驱动的灭火器可以扑灭火灾。
这个漫游机器人只是一个基本模型,本讲座将会告诉你怎样在基本框架上加装更复杂的自动功能。漫游者用到在前几讲中已经讲过的技术,如果你还没有读过,那就先读一下。
制作底座
可用现成的铝型材做漫游机器人的底座,漫游机器人样机用铝支架做底盘,因为铝可以减少机器人的重量,这样大小的机器人没有必要用钢材作底座。
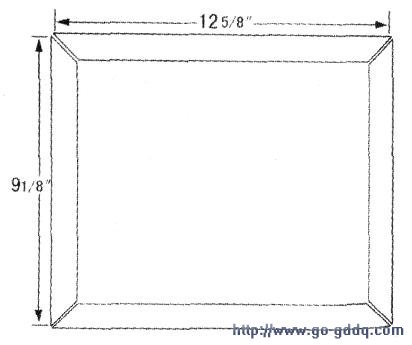
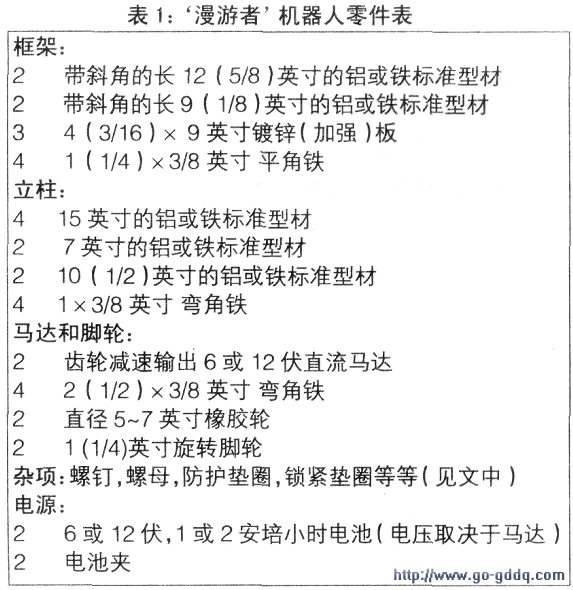
这个底座长宽各为12( 5/8)英寸和9(1/8)英寸,这种不寻常的尺寸设计使得它能够安装那些在本节后面将要讨论的加强的镀锌板。截取两条每边带45度斜角的长12(5/8)英寸的铝型材,如图所示(可参阅下表列出的部件)。同样截取两条长9(1/8)英寸的铝型材。用( 1/4)×3/8英寸平角铁和( 8/32)×1/2英寸的螺钉和螺帽把支架组装起来。必须保证尺寸要尽可能的准确,切边要整齐平滑。因为你要安装作为平台的板子,对于这个设计来说精确的正方形框架十分重要。免得固定螺丝时遇到麻烦。