・上一文章:基于D-S证据理论的多传感器数据融合
・下一文章:长虹BQ系列直流变频空调室外机控制电路分析与检修
摘要 数据处理的速度不但取决于计算机本身,而且在一定程度上取决于的算法复杂程度,算法运算量的大小直接影响到设备运行的质量。文中通过对分布式Zigbee多节点传感器数据融合中的轨迹关联问题进行探讨,对节点状态估算进行推导,形成节点状态估算算法,提供了简单、方便、实用的轨迹关联算法。
关键词 Zigbee;传感器;轨迹关联;目标跟踪
分布式Zigbee多节点传感器结构,以用较低的费用获得较高的可靠性和实用性,可以减少数据总线的频宽和数据处理的要求;当一个传感器的性能降低时,其观察结果对整个传感器的信息融合性能和结果的影响较小;同时,可以逐步增加数据采集节点的数量,使系统的结构适应控制中心的操作要求,并有与集中式结构相同或类似的精度。设计新的多传感器数据交换系统时,分布式结构已成为优先选择的方案。分布式结构在交通管制、监视系统和多平台数据融合系统有着广泛的应用前景。在分布式多传感器坏境中,每个传感器都有自己的信息处理系统,并且各系统中都收集了大量的目标信息。那么,一个重要的问题是Zigbee路由节点,如何判断来自不同节点的两个信息是否表示同一个目标信息,也就是轨迹关联问题;解决了轨迹关联问题,实际上也就解决了Zigbee多节点传感器覆盖区域中的重复跟踪问题。
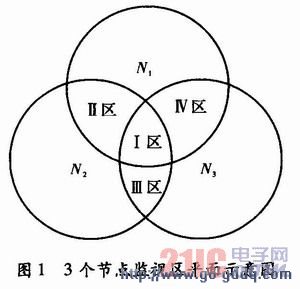
对于Zigbee节点N>2的多节点情况,所有节点不仅存在着共同的公共监视区,而且各节点间也可能存在局部公共监视区,如图1给出了Zi-gbee节点N=3情况下的公共监视区平面示意图。其中,I区为3个节点的公共监视区;Ⅱ区为节点N1和N2间的公共区;Ⅲ区为节点N2和N3间的公共区;Ⅳ区为节点N3和N1间的公共区。从示意图中不难看出,可以通过N1分别和N2、N3进行数据关联校验,然后再进行N2和N3数据关联校验,这样I区的轨迹多关联了二次;由于关联在数学上是等价关系,即对I区的轨迹而言,N1与N2关联校验一次之后,再对N2和N3进行一次关联校验即可。因此,N1与N3关联校验时可不考虑I区的轨迹,而只考虑他们之间的监视公共区(Ⅳ区)轨迹;对I区各节点公共区的轨迹也可以单独处理,有两种方法:一种是N1和N2关联,然后N3和N2关联,再运用等价关系的可传递性形成N个节点的共同关联轨迹。另一种方法是将其化成多节点分配问题,共同监视区轨迹处理完后,再分别处理两个节点间的重叠区的轨迹。这两种方法的优点是直观、简单、容易理解、工程上容易实现,当节点N较少时处理速度较快;但当节点N较多时处理速度成倒指数规律衰减,同时,这种处理方式缺乏严格的数学描述。所以,为提高分析轨迹关联的科学性、严密性,下面采用多节点分配方法探讨Zigbee多节点传感器数据融合中的轨迹关联问题。
1 多节点关联问题的求解
对于多节点关联问题的求解,其复杂程度随着节点数量的增大成指数规律增长。基于测量的多节点分配方法可以形成一套完整的算法。下面先讨论传感器测量的划分。
考虑有3个Zigbee节点传感器形成的观察量![]() 是来自j1、j2和j3Zigbee节点传感器测量的集合;针对划分测量,假定测量
是来自j1、j2和j3Zigbee节点传感器测量的集合;针对划分测量,假定测量![]() ,n=1,2,3的引入可以是在测量单个和两个节点传感器的检测目标交互中,把观测量看作是由3个传感器形成的观测量。若传感器j1在位置
,n=1,2,3的引入可以是在测量单个和两个节点传感器的检测目标交互中,把观测量看作是由3个传感器形成的观测量。若传感器j1在位置![]() 丢失目标,而传感器j2和j3的测量源于目标t,则这一情况的似然函数可表示为
丢失目标,而传感器j2和j3的测量源于目标t,则这一情况的似然函数可表示为

式中,Z0j2j3是3个传感器对位于目标真实位置向量![]() 处的同一目标的测量集合;PDs是传感器s的检测概率;
处的同一目标的测量集合;PDs是传感器s的检测概率;![]() 表示传感器s的第js测量值。这一事件的似然函数为
表示传感器s的第js测量值。这一事件的似然函数为

式中,u(js)为二值示性函数,当js=0时,u(js)=0;否则,u(js)=1。





