・上一文章:矿用水介质单体液压支柱的研制与使用
・下一文章:大马力拖拉机的使用与维护
摘要:本文阐述了拖拉机曲轴生产线用清洗机械手研究设计的重点内容,包括设计的目的、方案构思、轻量结构、强度校核、附属部件的设计、三维建模等。
1 设计的目的和意义
拖拉机可应用于国民经济的各个部分,是现代化农业生产所必备的动力机械,在农业生产中作用大、用途广。
拖拉机的使用在我国已有近百年的历史了,它的发展和使用促进了农业生产的发展,而现代化农业的发展又促进了拖拉机技术的进步和完善,以不断提高劳动生产率、改善劳动条件,从而获得更大的经济效益。
我国的拖拉机从无到有,发展异常迅速,但与国外相比起步较晚,技术还比较落后,无论在产品的质量、数量上,还是在品种上与发达国家相比,都有一定的差距。
近50年来,国外拖拉机的功率日趋增大,技术水平越来越高,对生产的要求,特别是对生产中各零件的要求更是越来越高,在零部件清洁方面大多采用自动线清洗或机器人清洗,而机器人清洗是高于自动线清洗的崭新的技术,在机器人清洗设备中,机械手的设计是很关键的部分,下文主要介绍一下曲轴抓取机械手的研究和设计。
2 设计方案构思
2.1抓取工件位置及定位方案的确定
机械手抓取工件的原则是不伤及加工精度较高的主轴颈和连杆轴颈,定位稳定可靠,不遮挡工件主要部位的清洗,保证清洗设备中高压水流能够直接冲击主轴颈和连杆轴颈表面。根据这一要求和曲轴的具体结构,确定以曲轴两端的中心孔定位并两端用夹紧力夹紧,这样即限制了曲轴在x轴、Y轴方向上的移动自由度和转动的自由度,又能保证工件牢固可靠,在机械手缓慢移动和快速移动中工件曲轴不会松脱。上诉夹紧定位也限制了z轴移动的自由度,而z轴转动的自由度还处于自由状态。被夹紧的工件一曲轴有两端,即法兰端和长轴端,在法兰端面有个定位销孔,在该孔中插入定位销,定位销的另一端与夹紧手臂固定,曲轴转动的自由度也被完全的限制。
2.2机械手整体结构的方案构思
欲实现上文中确定的定位和夹紧的功能,需要有两只机械手手臂,并且能够移动,以便实现夹紧时曲轴在机械手的操纵下完成直线移动和曲线运动的目的,同时,机械手又能松开曲轴放置在指定的位置,实现抓取另一只曲轴继续清洗的功能。
能够实现这种移动的动力原件有多种,如气爪、气缸、油缸、电缸等。在没有特殊要求的情况下尽量采用气缸,因为它具有成本低廉、结构简单、体积小、重量轻、能源清洁方便等优点。
两只手臂都需要移动就需要两只气缸,如果只需要一支手臂移动只需要一只气缸就可以满足要求。由于机械手是由机器人带动工作的,而机器人可以在一定的范围内做任意动作,控制机械手到达任意位置,因此在机器人带动机械手抓取曲轴时,可以机器人带动一只固定的机械手臂靠近曲轴的一端,之后另一只手臂在气缸的驱动下夹紧曲轴的另一端,这样只需要一只气缸即可完成要求的动作。
设计这种机械手需要有一个相对于机器人固定的部件,我们称它为连接块,它前端与机器人的连接盘连接,下端与机械手的固定手臂连接,也与气缸固定连接,活动的机械手臂与气缸连接,并随气缸做直线移动。
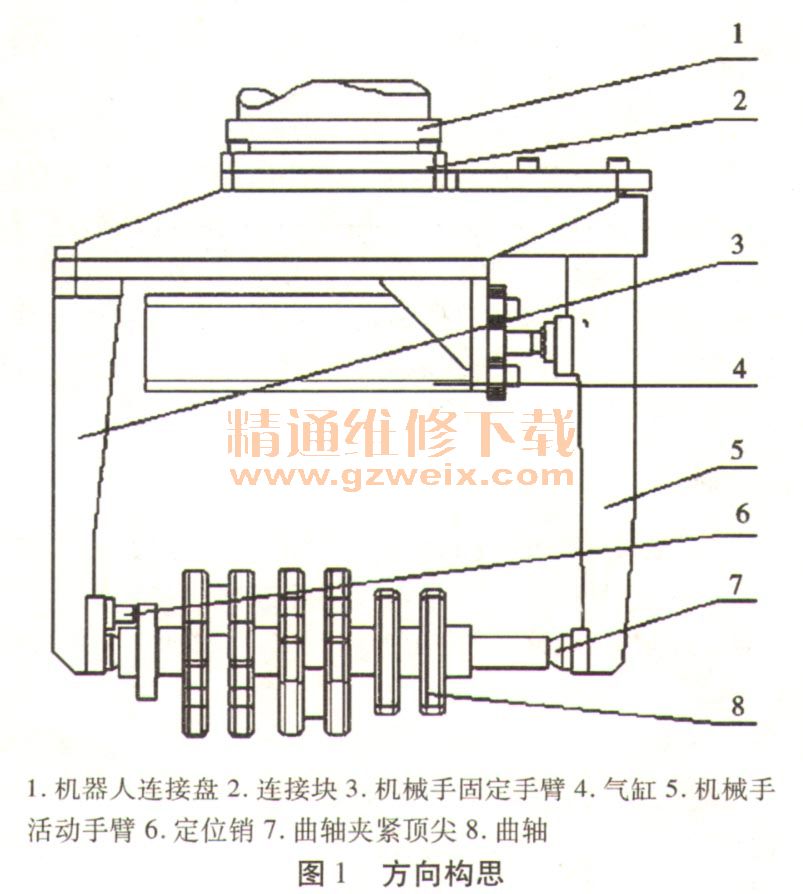
气缸在夹紧曲轴时,两只机械手臂受弯曲应力的作用,所以两个手臂在设计时要有一定的抗弯强度和较好的刚度。而活动手臂的弯矩会理所当然的传递给气缸,至使气缸也承受较大弯矩的作用。而气缸本身不具备抵抗弯矩的能力,只能承载轴向载荷。解决的办法是增加一组直线移动导轨,导轨的一端与连接块固定,另一端与活动的机械手臂固定。这样活动的机械手臂的弯矩直接传给了直线导轨,直线导轨的主要作用就是承载弯曲应力的作用,把活动手臂的弯矩通过导轨传给连接块。方案构思如图1所示。