・上一文章:矿用水介质单体液压支柱的研制与使用
・下一文章:大马力拖拉机的使用与维护
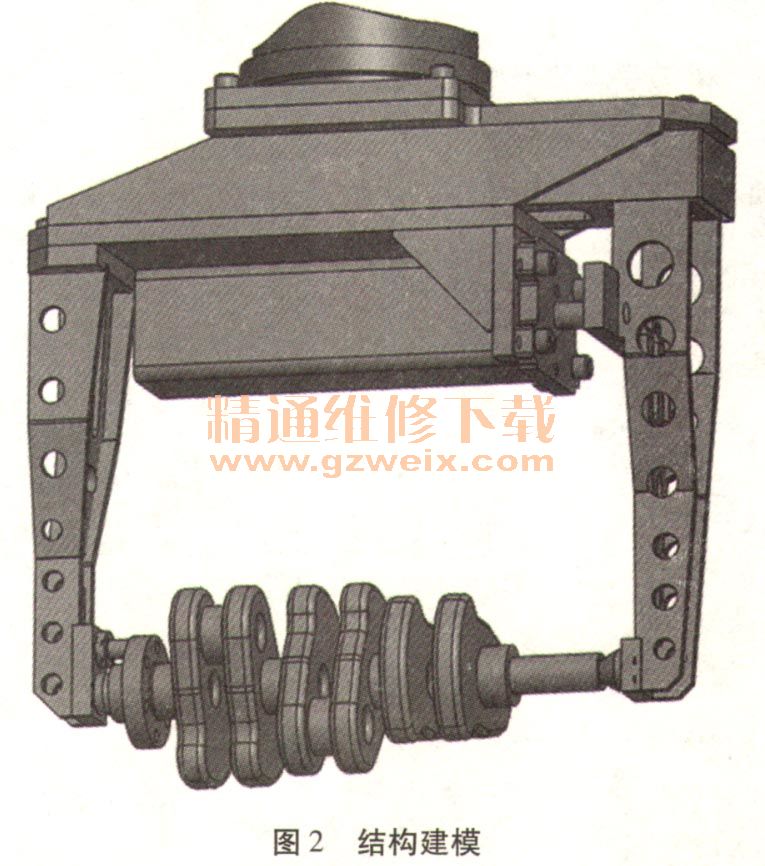
3 整体结构建模
该机械手是装载于机器人连接盘的动作部件,机器人实现将机械手移动到所需要的位置,机械手实现抓取目的工件。应用以上构思的方案,通过计算机三位软件建模,得到拖拉机曲轴生产线抓取曲轴清洗机械手整体构造如图2所示。
4 机械手手臂的轻量化设计
机器人以及气缸所能承受的载荷是一定的,如果机械手连同曲轴的重量较大,就需要选择较大的机器人和气缸,这就需要更高的成本投入,也浪费电力、气源等能源。在设计时,曲轴的重量是不可以改变的,但是,机械手臂的重量可以在设计时采取一些措施,使其在保证要求的前提下,尽量减少实体材料。手臂主要承载弯矩的作用,如果设计成实体结构,显然是不合理的,本设计中采用了类似于工字钢结构的截面,在长度方向上两端尺寸不等,近似于等强度梁,在工字钢底板的中性层附近进行挖空处理,在保证强度和刚度的前提下,尽可能的减少重量。
5 气缸的选择
已知条件:生产车间气源压力为p=4 kg/cm2,曲轴重量18. 6 kg,两端顶尖孔角度60°,中心孔深度23 mm,安全系数K =3~4,两端顶尖顶端距端面留出15 mm的距离。
5.1气缸行程的选择
气缸行程h=23×2+15×2 =76 mm
查表,按气缸标准,选择气缸行程为100 mm。
5.2气缸直径的选择
根据曲轴两端中心孔的参数,计算夹紧力
F1=18.6×10=186 N
F2=F1·ctg30°=186×1 .732=322 N
F=K·FZ=(3-4) × 322 = 966-1288 N
选择直径为63 mm的气缸,夹紧力为

符合夹紧力的要求。
5.3选择气缸型号
根据以上计算结果,结合清洗设备对动力原件的要求,选择型号为CNA2F63-100防水带端锁气缸即可满足使用要求。
6 机械手臂变形量校核
已知条件:气缸夹紧力P=1247 N,机械手臂悬臂长度L=31.8 mm(由结构设计确定),材料的弹性模量E=2x 105 kg/cm2,手臂截面为近似工字型,由两块相同并镜像的底板和一块腹板组成,每块底板根部均为矩形截面,其尺寸为100 mm×12 mm,要求夹紧处的弯曲变形量小于0. 05 mm。
校核如下:
腹板的抵抗变形的能力可以忽略不计,只计算两块底板的变形量,矩形截面的轴惯性矩为