・上一文章:剖析福特蒙迪欧混合动力汽车变速器动力传递
・下一文章:大众迈腾电子手制动无法正常释放故障检修
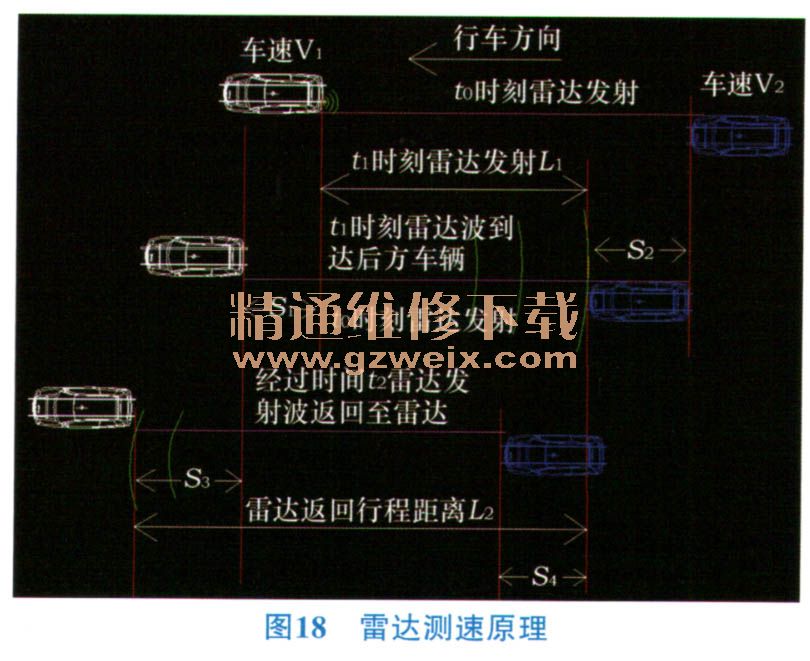
前提是假设前后两车车速为恒定值,分别为V1,V2,雷达波的频率为厂,雷达波长为λ,雷达传播速度ν0= fλ。
在t0时刻,汽车1发出雷达波开启盲区监测系统,雷达波向汽车2传播。经过时间t1,雷达波到达汽车2,此时雷达走过的距离为L1=ν0×t1,s1=ν1×t1,S2=ν2×t1;经过时间t2,雷达波返回至汽车1,雷达返回的距离为L2=ν0×(t2-t1),S3=ν1×(t2-t1)。得出t1 =t2(fλ+ν1) /2f λ,所以L1=t2 (f λ+ν1) /2.
雷达波的频率较快,所以只测定出雷达波第1次触碰到前车的距离即可为当前的两车距离。
3 结论
汽车的安全性能是保证自动驾驶技术最重要的指标,驾驶辅助系统能够很好的帮助车主避免各种危险情况的发生,所以驾驶辅助系统的标定就显得非常重要。文中盲区监测变道辅助系统标定主要研究了3种形式的标定方法,具体选型可以根据检测场地的大小及生产节拍要求来选择标定方式。静态标定场地不受天气影响,但是浪费生产节拍,而动态标定受天气、雨雪等环境因素影响较大。因此,垂直式适用于标定场所较小,而水平布置式不受场地要求。





