����һ���£���������������ƶ�ϵͳ����ԭ�������
����һ���£�����������1.8GSI���������ϼ���
3.4ͨ���Զ���������ϵͳ���в���
�ڲ��������ʵIJ���λ��ȷ������λ��ǡ������Կ�ʼ���в������ڼ�ʻ�˿�ʼ�����Զ�����֮ǰ�������ȹ��˵����������ھ�ֹԼ0.5s����������ֹʱ����ָ�ӹ��˵���������������������ʱ�䡣�����ʱ����������ϵͳ��������������ʼ������ʻ·�ߡ�
���Զ����������������ʻ�˲ٿط����̣����Զ���������ϵͳ�����ƶԷ���IJ����������ռ���õ���ʻ·��ʻ�벴��λ���ڶ���Ƴ���λ�Ĺ����У���ʻ�˿���������DZ���ʾ���Ͽ���ǰ�л���˵IJ�����ʾ��λ�ں��������ٴ�����G44��G46����ʶ��������ǰ�л��Ǻ��ˡ�
���⣬�ڵ��������л��������õ�8����������ϵͳ��������4ǰ4��4�������Զ���������ϵͳ��������2ǰ2������ؾ��롣���������̽���������DZ���ʾ������ʾ�Զ�ת��������ɡ�
������Զ�����������ʶ��������λ����Σ����������ʻ�˽����˷����̿��ƣ��Զ������ͻ���ֹ��
1������ƽ�г�λ
��ʻ�˰����Զ���������ϵͳ����ѡ��ƽ�в������ܡ���Ӧ��ͼʾ����ʾ������DZ���ʾ���ϡ�ƽ�в�������ͨ�������λ��ɡ�ͼ12��ʾΪ����ƽ�г�λʾ��ͼ��
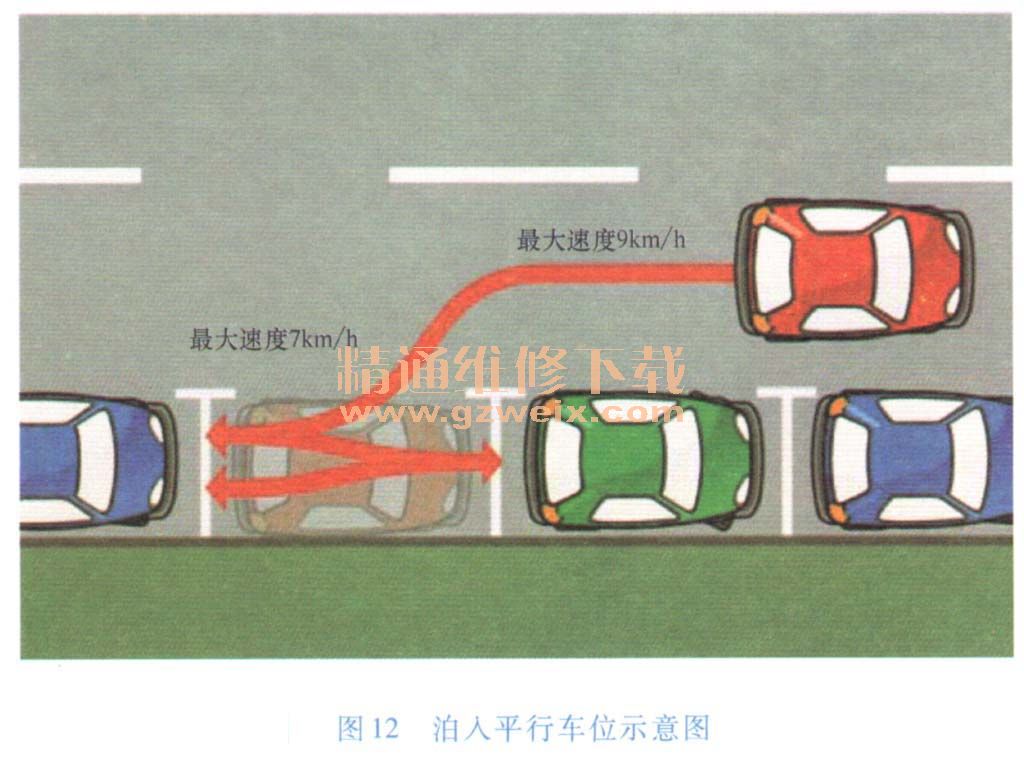
����ʱ���Ӳ�����ʼλ�õ����벴��λǰ����߳���Ϊ9km/h��ֱ����ʻ������ʻ�˲���λ�Ĺ����У�����ٶ�Ϊ7km/h����ת����ת����
2�������ϰ���֮��
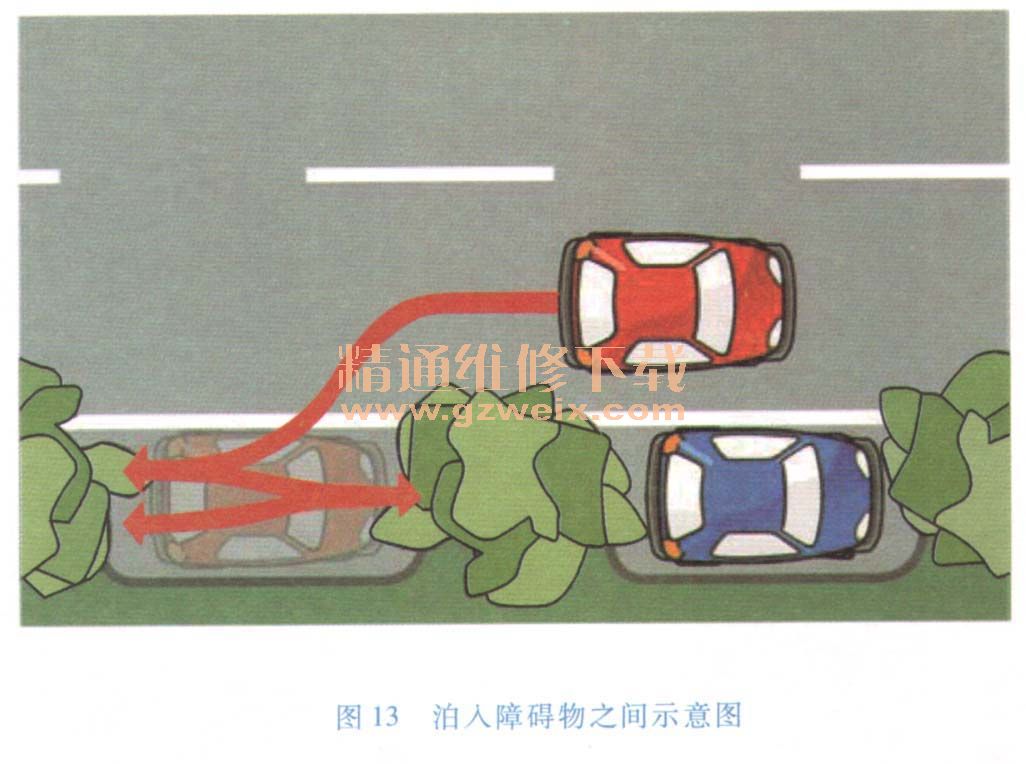
�Զ���������ϵͳ������ʶ������������ʶ���������塣ϵͳ���ԶԷ���ǽ�桢Χǽ��·�صȽ��ж�λ�����⣬������������ʻ��������ľ������Ͱ����ľ�Ի�Ħ�г����ϰ���䲴�������ʶ��·�أ�����ھ���·�ر�Ե15 cm����“ͨ��·�ض�λ”�ķ�ʽ���в��������ʶ��·�أ���Ὣ������ͣ�����ϰ���ǰ����������ͣ��һ�š�ͼ13��ʾΪ�����ϰ���֮��ʾ��ͼ��
3�����봹ֱ��λ
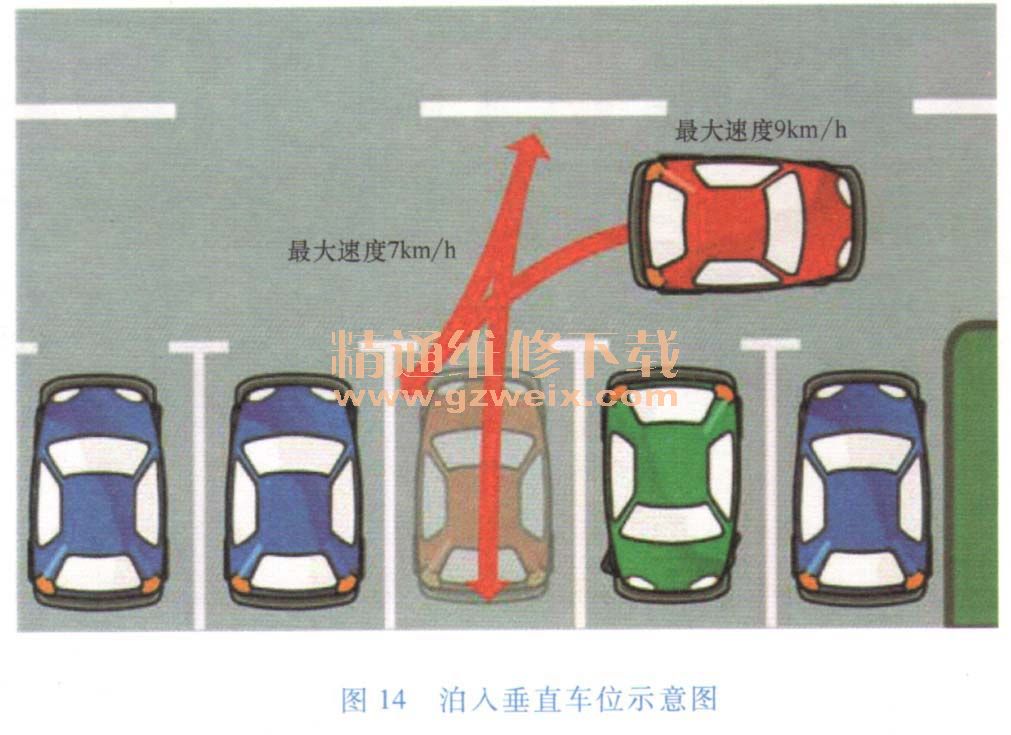
��ʻ��ͨ���Զ���������ϵͳ������ѡ��ֱ�������ܡ���Ӧ��ͼʾ��������DZ���ʾ������ʾ��������ֱ�������̿���ͨ�������λ����ɡ�Ϊʹ����ſ���ͬ�̶ȴ�ϵͳ����Ƴ���ͣ�ڳ�λ�����м䡣λ�ڳ������Ĵ�����G716��G717������Ҫ�������Ƴ�����ʹ��λ���ڳ�λ���м�ġ��������������ⷶΧ������������Ӧ�ϰ����PDC������һ�¡�ͼ14��ʾΪ���봹ֱλʾ��ͼ��
3.5�ƶ���������
�ƶ��������������ã��ڳ�����������ʱ���٣������ϰ�������ײΣ��ʱ���ƶ���������ֹ�Ա�����ʧ��
�ڳ������ٷ�Χʱ��������9km/h��ֱ����ʻ����7 km/h����ʻ�˲���λ�Ĺ����У�ʱ���Զ���������ϵͳ��Ҫ��ESPִ�м��١�Ȼ�����̻������Ҳ����˵�Զ���������ϵͳʼ�ձ��ֿ���״̬�����������������������10 km/h���Զ���������ϵͳ��ֹͣ������
��ʼ�Զ�����������ʻ·���Ϸ������ϰ����Ҽ�ʻ��δ�ܼ�ʱ���ֽ����ƶ�����PLAϵͳ�������ϰ�������ײΣ��ʱ��ϵͳ������ƶ�ֱ������ֹͣ���ù���ֻ���ڳ��ٲ������������¸�1. 5 km/h�ķ�Χʱ�ſ��á��������ƶ�����ֹ״̬���Զ�����������ֹ���ٴ������Զ���������ϵͳ��������ʶ��λ��





