����һ���£���������������ƶ�ϵͳ����ԭ�������
����һ���£�����������1.8GSI���������ϼ���
���������Զ���������ϵͳ�Ĺ������ԭ��
�����Զ���������ϵͳ�����ܸ�������ͣ�˸�С��ƽ���ڳ����ij�λ��ƽ�в����������һ��ܽ�����ͣ������ڳ����ϵij�λ����ֱ��������
3.1�Զ���������ϵͳʾ��ͼ
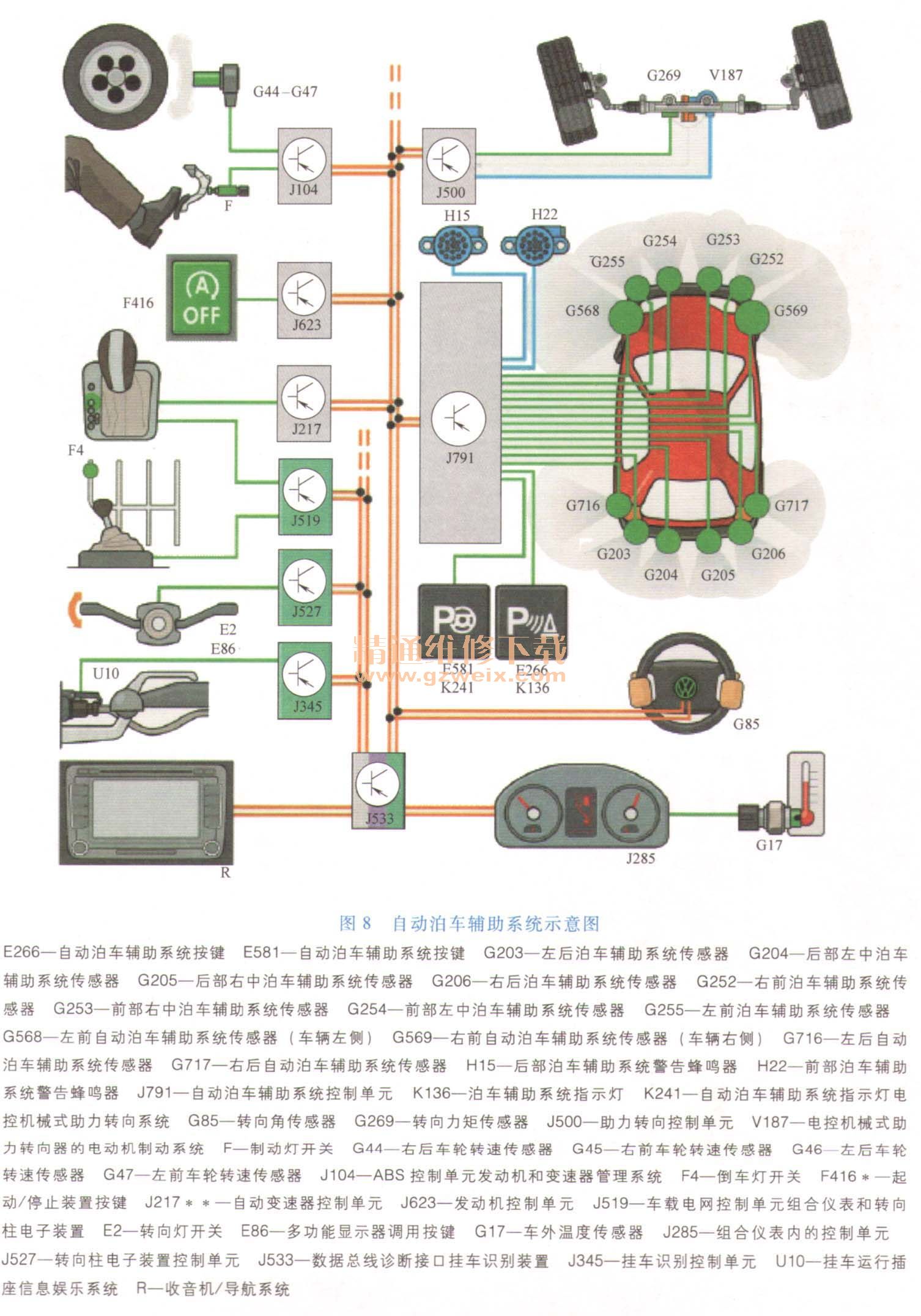
Ҫʵ���Զ���������һ�����ӵĹ��ܣ���Ҫ�����ĸ�����ϵͳЭͬ������ͼ8��ʾ��ϵͳʾ��ͼչʾ��CAN���������е�������ϵ��
3.2�����������
ʹ���Զ���������ϵͳ������λ�Ĺ��̿ɷ�Ϊ���¼����Σ���������λ���ȡ������Զ���������ϵͳ�����Զ���������ϵͳ�����½��в�����
�Զ���������ϵͳ�����ʻ���ṩת�����֮ǰ�������ȶԲ���λ���в�������ʶ��������ڲ���λ��λ�á�
��ʹ�Զ���������ϵͳδ��������������G568��G569���Ա��ֹ���״̬�������ڳ���ǰ�й����У������ٵ���40 km/h��ƽ�в���λ�������20 km/h����ֱ����λ��ʱ������λ�ڳ�ǰ�˵Ĵ��������������������п�ͣ��IJ���λ����������������̽�������4.5m���ҡ�
ͨ���������������ҵ���ʶ�����ת�䴦������ϵIJ���λ�����ڱ�ֱ��·��û�в�𡣳��������⣬ϵͳ����ʶ�����������Լ�ijһ�����Ļ�����������֮��IJ���λ�����PLAû��ʶ�������λǰ���С�����壬������������Щ����ʱ�����ɲ����������ϵͳ������������
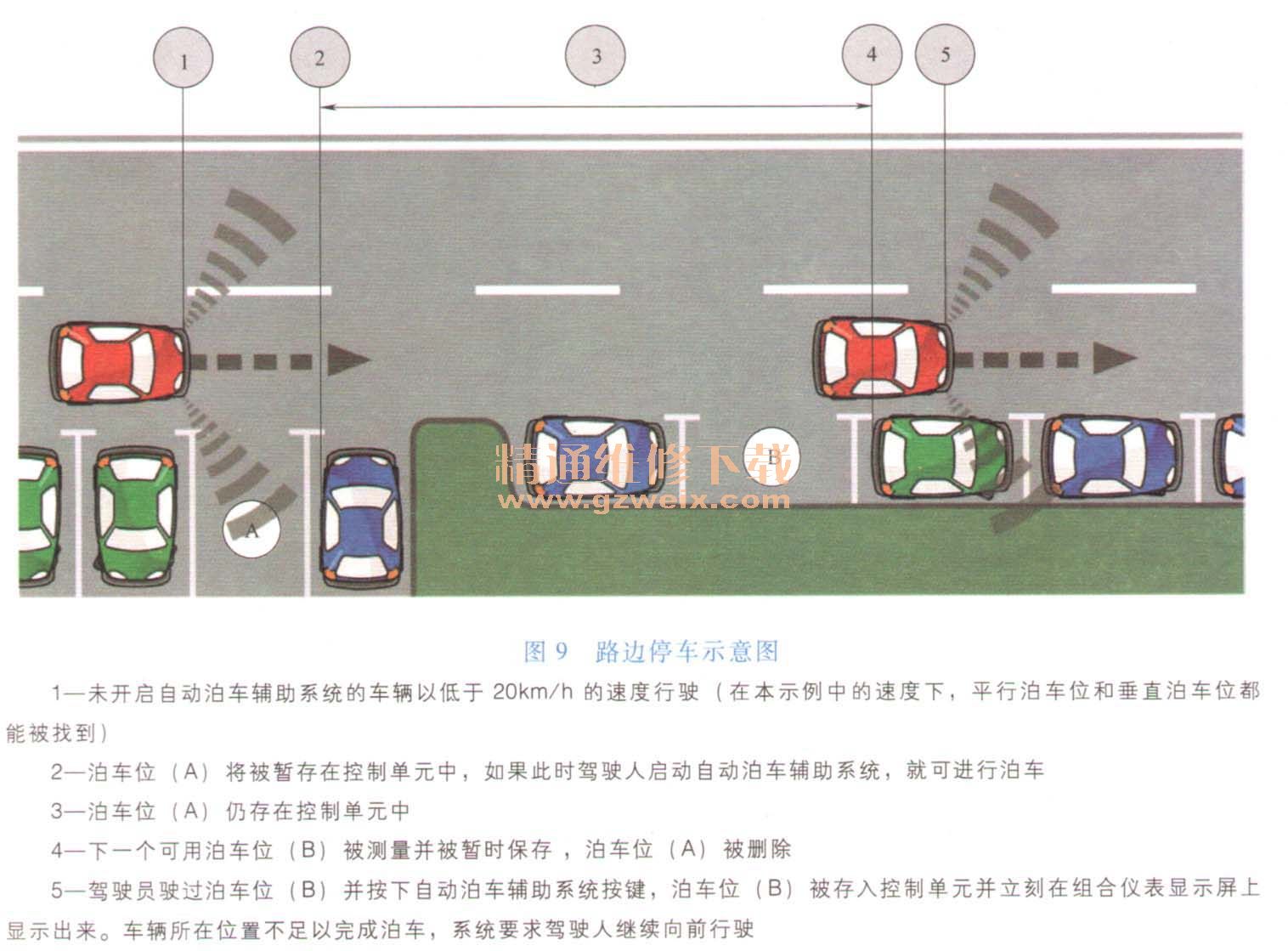
���۲���λ�ڵ�·��������ұߣ����һ�����Ⲵ��λ�����ݻ���ʱ�洢���Զ���������ϵͳ�Ŀ��Ƶ�Ԫ�С��������µIJ���λ������Զ����һ������λ��ʻ��ƽ�в���λ����15m����ֱ����λ����8m��ʱ��������һ������λ�����ݾͻᱻɾ����
������Ч��Χ�ڰ���PLA�����������Զ���������ϵͳ����¼�ڿ��Ƶ�Ԫ�еIJ���λ�ͻ�������DZ���ʾ������ʾΪ�ڳ�������Ӱ�е�һ�οհ�����
ͼ9�����������ڵ�·�ұ߲�������λ�Ĺ��̡�
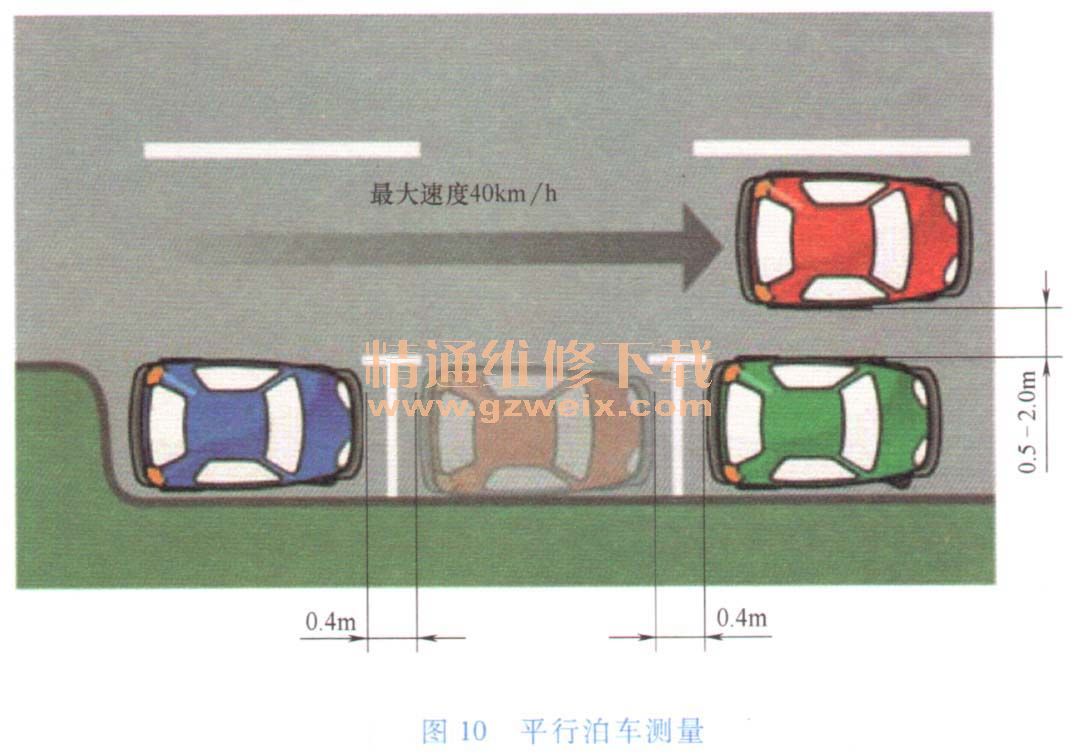
ƽ�в���������ͼ10��ʾ������Ҫ���ƽ�в���λ����Ӧ���ڳ������ȼ��ϻ��������밲ȫ���루ǰ�������ٸ�����0. 4 m ����ʻ������λʱ�ij���Ҫ����40km/h�������������ʼλ��Ӧ��ƽ�в���λ�ԣ�������ʻ�����ҳ�����������ͣ�źõij���֮��ľ���Ϊ0. 5��2. 0m��
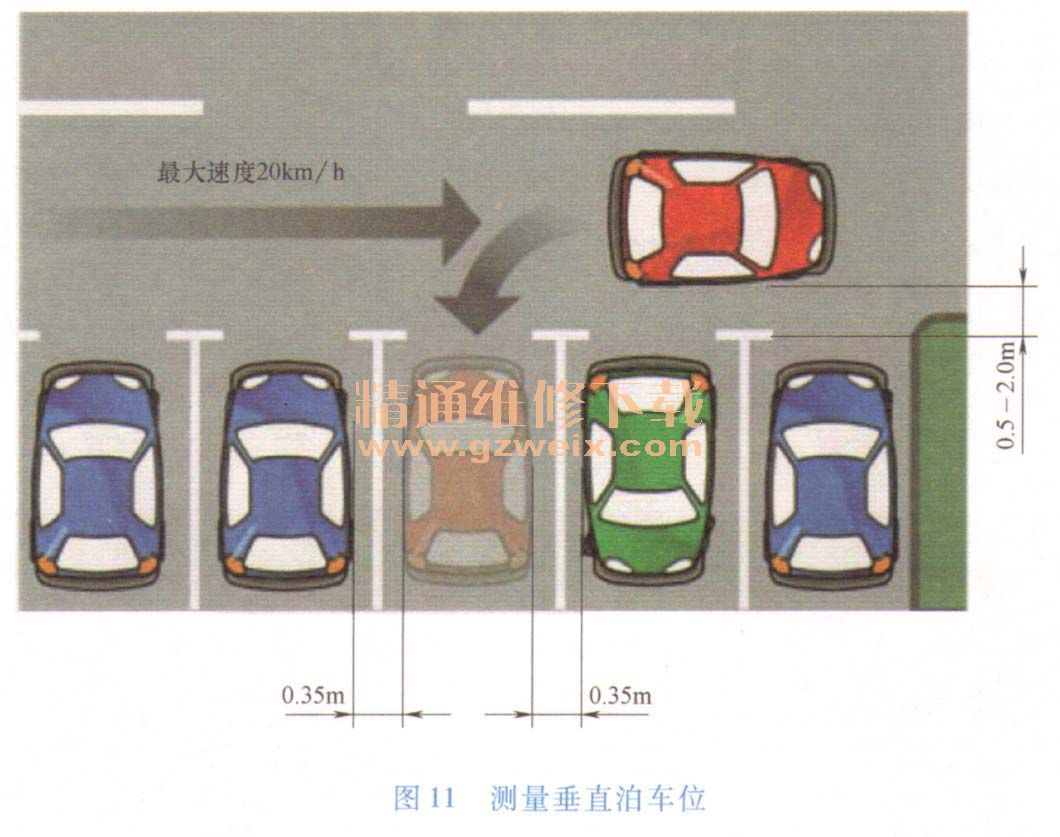
������ֱ����λ��ͼ11������Ҫ��Ĵ�ֱ����λ����Ӧ���ڳ������ȼ��ϻ��������밲ȫ���루�������ٸ�����0. 35m����ʻ������λʱ�ij���Ҫ����20km/h�������ڵ����λ��Ӧ�ڴ�ֱ����λ�ԣ�������ʻ�����ҳ�����������ͣ�źõij���֮��ľ���Ϊ0. 5��2. 0m��
һ������λ��ȷ�����Զ���������ϵͳ�ͻ�ͨ������DZ���ʾ���ϵ���Ӱ����Ҫ���ʻ�˼���ǰ�У�ʻ������λ��ֱ���ﵽһ���ʺϲ�����ʼλ�á�
3.3��������λ���ܵĹر�
��������40��50km/h�����ƽ�в���λ����20��50km����Դ�ֱ����λ��ʱ���Զ���������ϵͳ�л�������ģʽ������ģʽ������ʻ�˿���������DZ���ʾ���Ͽ���ָʾ���������ٶ��ٴε���40km/h��20km/hʱ���������°�������ϵͳ���������ͻῪ������ʼ̽�Ⲵ��λ��
�ڳ����ٶȳ���50km/hʱ����������λ�Ĵ���������ȫ�رգ�����֮ǰ��������ݻᱻɾ�����Զ���������ϵͳ��������������
������ֹͣ��ʻ����30sʱ��������Ҳ����ʱ�رա�һ�������ٴ�������������������������





