・上一文章:车主行车的十个误区
・下一文章:剖析奥迪新TT新技术(三)
1.3全液压驱动自行式高空作业车
(1)自行式高空作业车的构成及特点
自行式高空作业车主要由作业平台(含伸出部分)、剪叉式升降机构、车体、防倾倒装置、行走机构、电源、液压系统及电气控制系统等组成,其总体布局,如图4所示。
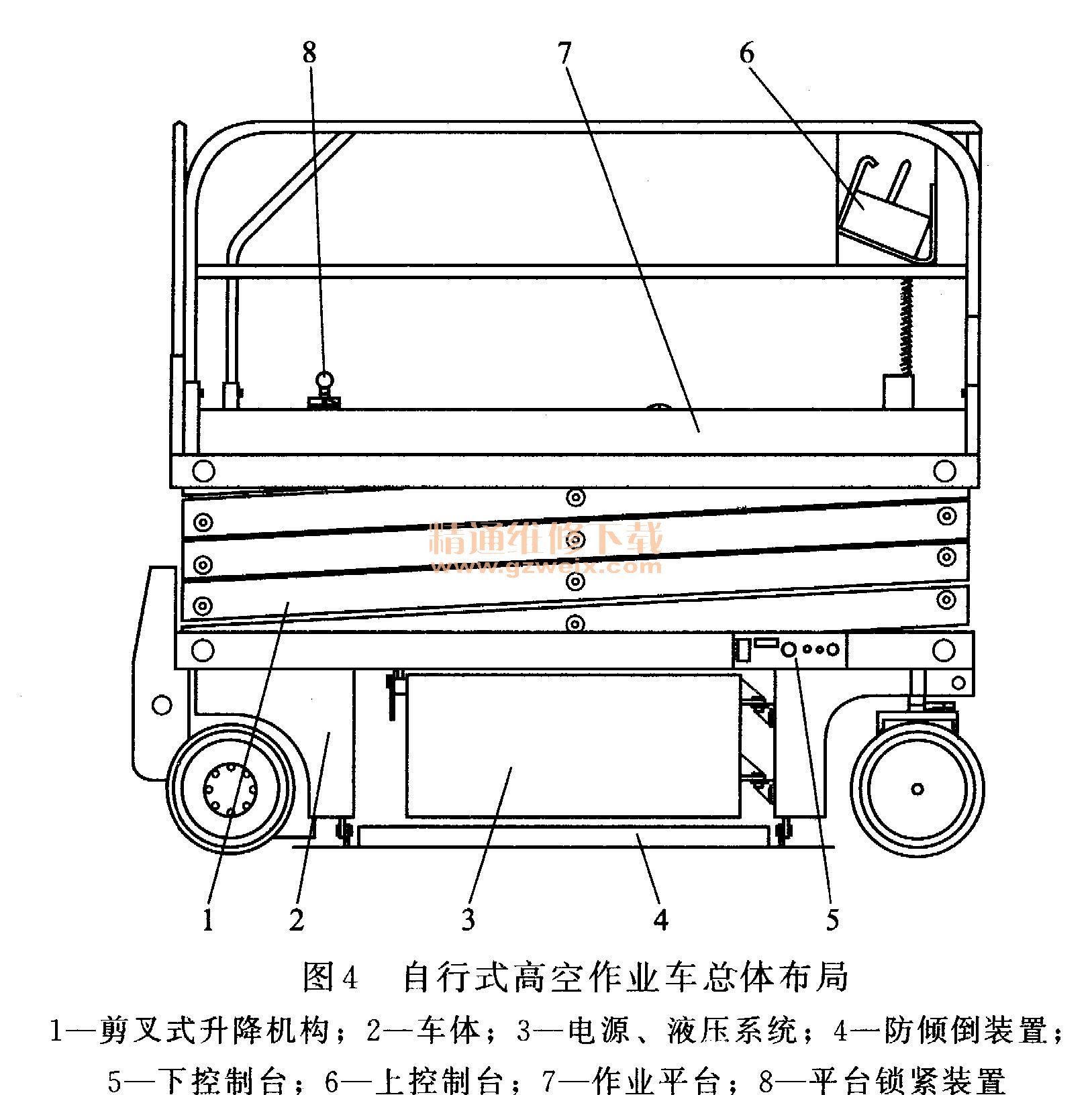
作业平台安装在剪叉式升降机构上,然后共同安装在可行走的车体上。控制台分上控制台和下控制台,上控制台在作业平台上置于适当的高度,便于工作人员在高空作业下完成所有的操作,下控制台在车体的侧面,便于地面工作人员在地面上操作。电源(蓄电池)、液压系统的油源、电气控制系统的控制电路部分安装在车体底盘内。防倾倒装置设置在车体底部。
高空可行走是这种作业车的一个重要特性,它可完成多种情况下的高空作业,利用自身动力(蓄电池)自动行走,可在工作场地内、场地与场地之间行驶,只需要一个人就可以在高空作业平台上连续完成高空作业,实现上升、下降、前进、后退、转向等动作。既可以在作业平台收藏状态下行走,也可以在作业平台升起状态行走,而且为了安全起见,根据作业平台的高度可自行改变行走速度,升起速度根据升起高度不同可自行调整。另外,在地面上也可进行升降操作。
作业平台有行走速度自动转换和防倾倒功能,升起后行走速度自动切换为低速,防倾倒装置自动打开,车两边的安全防护板向下翻转,处于保护状态。
整车动作采用全液压驱动,驱动力大,工作平稳可靠,作业车采用了自动驻车制动系统,制动系统采用液压自动制动装置,集行车制动装置和驻车制动装置于一体,结构紧凑,只要作业车停止行走,则制动系统自动工作。转向系统采用转向梯形机构和液压驱动,转向便利。
该车作业平台的最大升起高度超过8m,升降架为折叠式(也称剪叉式),支撑面积大,升起后稳定,收拢后高度低,便于攀登。整车操作灵活、方便,作业平台工作面积大,升降、行走平稳,噪声小,安全可靠,适用于飞机场等地面较平整的场所。
(2)自行式高空作业车的特点
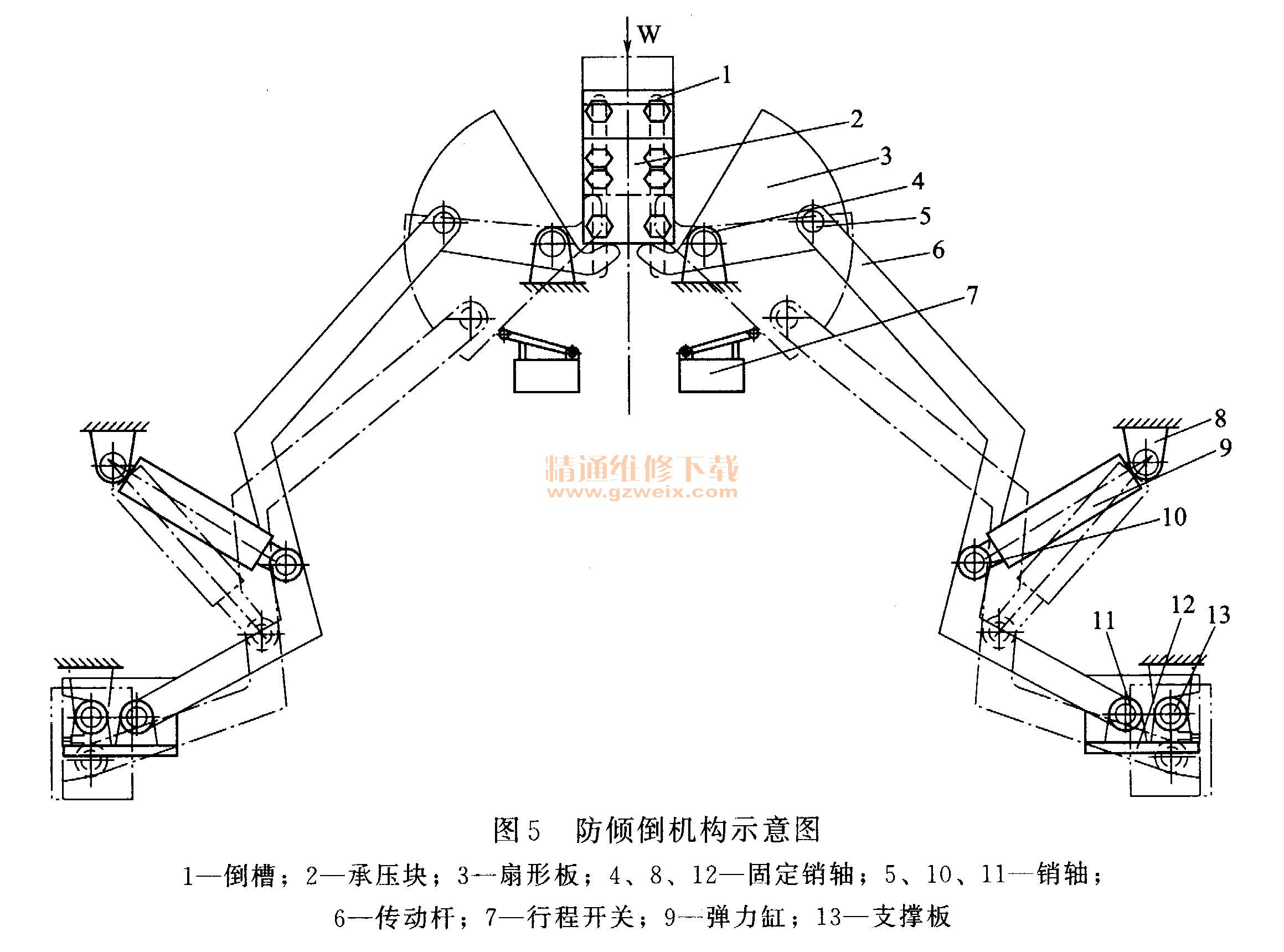
行走速度自动转换和防倾倒装置。作业平台升起后,作业车整体重心上移,稳定性变坏。为保证行走稳定且避免倾倒,作业车设有行走速度自动转换和防倾倒机构,如图5所示。
当平台升起时,车两边的安全防护板就会自动向下翻转,处于保护状态,行走时,若某个车轮掉入凹坑中造成平台倾斜,靠安全防护板的支撑,使高空作业车的最大倾角不会超过2.5°,大大增加了作业车的安全性。
行走速度自动转换和防倾倒机构工作原理是作业平台升起后,剪叉下的压杆脱离承压块2,承压块2不再承受剪叉和作业平台的重力W。
扇形板3在自身重力作用下,绕基板上的固定销轴4向下转动,并使承压块2沿基板上的倒槽1向上移动。当扇形板3向下转动一定角度后,扇形板3压下行程开关7。行程开关7发出电信号,减小驱动液压马达流量,使液压马达转速降低,作业车实现慢速行走。
在基板上的固定销轴8上,装有一弹力缸9。
传动杆6通过销轴10安装在弹力缸活塞杆上。传动杆6的两端分别通过销轴5和销轴11与扇形板3和支撑板13铰接。弹力缸活塞杆受弹力作用可移动,其最大移动量由弹力缸行程决定。当扇形板3向下转动时,传动杆6在扇形板3的带动和弹力缸9的作用下摆动,带动支撑板13绕基板上的固定销轴12向外转动90°,使支撑板13的离地间隙变小。若作业车车轮误入坑中,支撑板13便会接触地面,支撑住作业车,避免倾倒发生。
当作业平台降下后,承压块2在剪叉和作业平台的重力W作用下,向下移动,经扇形板3、传动杆6的传动,使支撑板13绕基板上的固定销轴12向内转动90°,恢复作业车的离地间隙。同时扇形板3脱离行程开关7,行程开关7发出电信号,增加驱动液压马达流量,使液压马达转速提高,恢复作业车快速行走。
(3)自行式高空作业车全液压驱动系统
自行式高空作业车是典型的机电液一体化系统,主要由机械部分、液压部分和电气控制部分组成。
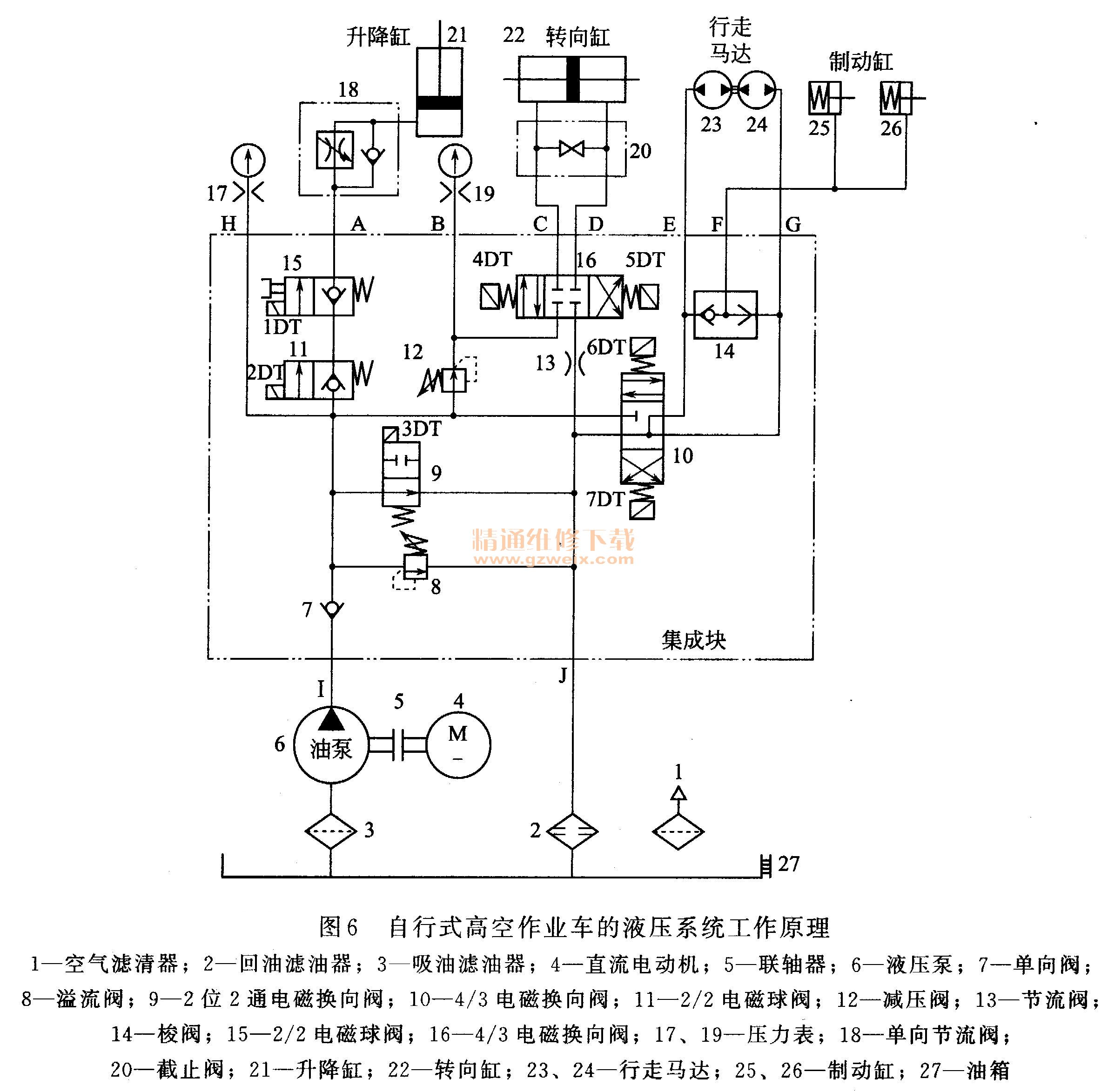 ① 压系统的工作原理及其构成。自行式高空作业车的液压系统工作原理,如图6所示,主要由直流电动机、液压泵、各种液压阀、执行元件(升降油缸、转向缸、行走马达、制动缸)、压力显示单元、过滤装置及其他辅助元器件组成。根据液压系统所完成的功能,将其分成油源回路、升降回路、转向回路、行走回路、制动回路等部分。
① 压系统的工作原理及其构成。自行式高空作业车的液压系统工作原理,如图6所示,主要由直流电动机、液压泵、各种液压阀、执行元件(升降油缸、转向缸、行走马达、制动缸)、压力显示单元、过滤装置及其他辅助元器件组成。根据液压系统所完成的功能,将其分成油源回路、升降回路、转向回路、行走回路、制动回路等部分。
a.油源回路。直流电动机4通过联轴器5和液压泵6组合在一起,是整个液压系统的能源所在;溢流阀8用于调定液压系统的最高压力(本系统中为16MPa),用作安全阀;吸油滤油器3、回油滤油器2在系统中对液压油进行两道过滤;单向阀7的作用有二,一是防止液压系统中的液体倒流回液压泵6,对液压泵6造成液压冲击,二是在对液压泵进行拆装维修时避免系统中的油液倒流,造成不必要的油液损失和环境污染;压力表17用于观测系统中液压泵出口(即溢流阀8)的工作压力,压力表19用于观测减压阀12出口的压力,这两个压力显示单元只有在系统调试时是打开的,根据高空作业车的需要压力,当把溢流阀8和减压阀12的设定压力调好之后,就将两个压力显示单元在集成块上的接口封上,作业车正常使用时就不再观测压力。
b.升降回路。升降操作既可在作业平台上进行,也可在地面进行,可以通过车体上的一个转换开关来选择。元件4、5、6组成的电动机泵组在接到启动的信号后开始工作,液压泵6排出的液体顶开单向阀7,到达换向阀11,通过操作作业平台上的手柄或者车体上的升降开关,使得2DT得电,3DT得电,I DT失电,则液压油经过换向阀11、15和单向节流阀18中的单向阀,进入升降缸21的下腔,活塞杆伸出,将作业平台顶起,完成上升动作,上升速度有两个,作业平台处于较低位置时其上升速度较快,作业平台处于较高位置时其上升速度较慢,速度的切换靠一个行程开关自动完成,速度的大小由行程开关控制直流电动机的调速回路来实现;如果需要作业平台停留在空中某一个位置,只需将手柄或车体上的升降开关复位(将手移开),则1DT、2DT失电,在阀15的截止状态,升降缸可靠地停留在所需位置;作业平台下降时,操作作业平台上的手柄或者车体上的升降开关,使得3DT失电,2DT失电,1DT得电,则作业平台在其本身和剪叉架的自重作用下,将升降缸下腔的油液经单向节流阀18中的节流阀、换向阀15的左位、换向阀11的右位、换向阀9的下位、回油滤油器2回到油箱,作业平台下降,其下降速度可通过调节单向节流阀18中的节流阀来调整。
c.转向回路。转向操作是在作业平台上进行的。该种作业车要求在平整的地面上行驶,不需要太大的转向力,更重要的是为了使转向平稳、可操作性好,转向油缸比系统中其他的执行元件所需要的工作压力要低,因此在转向回路中设置了减压阀12,从液压泵6中来的液压油经过减压阀12后进入换向阀16,通过搬动操作手柄,可以使得4DT或者5DT中的一个得电,决定换向阀16的工作位置,从而决定了转向缸22的运动方向,也就决定了作业车的运动方向,是左转弯还是右转弯。当系统出现故障时,打开截止阀20释放转向缸22两腔的压力;节流阀13为转向缸22的运动设置一个背压,使其运动平稳,转向油缸的速度不可调整。转向油缸22设置于两个前轮之间(即前轮转向)。
d.行走回路。行走操作在作业平台上进行。从液压泵6中来的液压油到达换向阀10,通过搬动操作手柄,可以使得6DT或者7DT中的一个得电,决定换向阀10的工作位置,从而决定了行走马达23和24的旋转运动方向,也就决定了作业车的运动方向是前进还是后退,行走速度有两个,作业平台处于较低位置时其行走速度较快,作业平台处于较高位置时其行走速度较慢,速度的切换靠一个行程开关自动完成,速度的大小由行程开关控制直流电动机的调速回路来实现。行走马达23和24分别安装于两个后轮上(即后轮驱动)。行走操作(包括转向操作)与升降操作不可同时进行,它们由一个转换开关进行选择。
e.制动回路。为安全起见,系统采取了停车即制动的方法,不再利用方向阀进行控制。当作业车处于行走状态时(此时换向阀10不在中位工作),利用梭阀14总是从行走马达的两个油腔中取出高压油,提供给两个制动缸25和26,利用液压的作用力克服弹簧力,制动缸动作,使得制动解除;当作业车处于停止状态时(此时换向阀10中位工作),梭阀14从行走马达的两个油腔中取出的都是低压油,则两个制动缸25和26在弹簧力的作用下处于制动状态,车辆不得行走。两个制动缸25和26安装于两个后轮内(即后轮制动)。
②主要元器件。根据高空作业车的有效载荷(250kg)和最高行驶速度0. 4m/s,确定各相关元件的规格。
综合分析高空作业车的使用和安装特点,系统需要的最高工作压力发生在作业平台从完全收藏状态开始升起的时候,综合考虑泵和升降缸的工作压力与规格尺寸,确定系统最高工作压力为16 MPa。
a.液压泵。各执行元件中,行走马达所需流量最大,据此液压泵选择排量为5mL/r的齿轮泵,这种泵的抗污染能力比较强,适合于室外工作。
b.升降缸。综合考虑升降缸的速度、产生推力、系统工作压力,选择缸径为90mm,活塞杆直径70mm的双作用单活塞杆式液压缸。
c.行走马达。根据最大行驶速度,并考虑行驶的低速稳定性和结构简单,选择排量为200mL/r的低速大扭矩马达。
d.转向缸。选择缸径50mm、活塞杆直径36mm的双作用双活塞杆式液压缸。
e.各种液压阀。选择液压阀时,应考虑其在为执行元件提供最大流量时,不要有太大压降,以减少功率损耗,考虑本系统中流量较小,各种阀均确定为规格6,为了使结构紧凑,各种液压阀均采用螺纹插装阀。
f.直流电动机。在平台上升初始阶段,升降油缸角度较小,顶起力量很大,为减小动力源的功率,需要工作在低速状态。在行走启动阶段要克服作业车自身惯性,也需工作在低速状态,这就要求液压系统在不同工作状态下输出不同流量。采用电动机调速方法与液压系统调速相比,可使液压系统简单,降低造价,为此选用直流调速电动机,通过改变电机转速来改变流量,以调节行走和平台上升速度。根据系统最大工作压力和液压泵的最大流量,确定直流电机功率为1. 5kW,工作电压为24V。为提高作业车续航能力,电源选择了12支铅酸动力型蓄电池供电,每支蓄电池的输出电压为2V, 250A·h,即总的电源电压为24V,一般可连续工作6h以上。
高空作业车属于行走设备,因此整个系统要尽量使其体积小、重量轻,结构紧凑,同时还要兼顾检修方便,采用移出式结构,将油箱和其他除执行元件外的所有液压元件放置于移出箱里,节省空间。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] 下一页
")
")
")
")

