・上一文章:自动转换双向驱动电路工作原理
・下一文章:创维46英寸PDP彩电IIC总线进入与调整
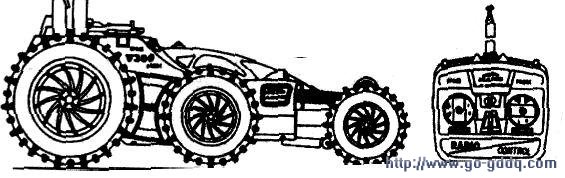
1、型及结构主要特点。组合与造型如图下所示,该遥控器比一般的遥控器多了两个发射按键,左面为向前跨越键。右面为向后跨越键。主体的造型特点是所有轮子直径都非常大,尤其后轮直径最大。并且各轮子周围排列很多突起的“爪”,目的是为了提高“探测者”在火星上通过障碍的能力,不仅如此。
为了不被火星上一些障碍挡住,在前、后、左、右4个动作基础上,又增加了向前跨越和向后跨越两个动作,使通过障碍能力大大提高。该玩具结构比较复杂,而且耗电量大,特配6V可充电池供电。在造型上最高的装饰物,兼有天线接收作用。
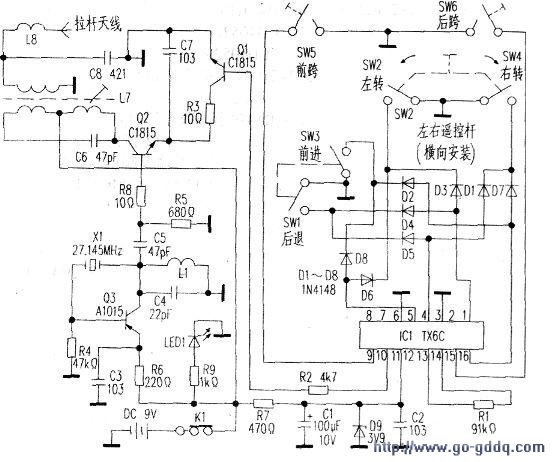
2.遥控发射电路工作原理
电路如上图所示。
ICI型号Tx6C.比Tx一2B多两个引脚,(1)、(4)、(5)、⑩为通道编码选通端。但与Tx一2的外部连接方式不同。该lC为外加二极管进行两两组合实现一种遥控功能,具体方法是:
(5),(16)脚为前;(1)、(4)脚为后:(1)、(5)脚为左;(4)、(4)脚为右。另有两个单脚选通端是:(9)脚为向前跨越;(15)脚为向后跨越。编码脉冲由(10)脚输出,经R2加到Ql基极。经Ql放大、经R3,c7加到Q2发射极。 由Q3,XI振荡产生的27.145MHz射频信号经c5、R8加到Q2基极,由Q2进行调制,由C6、L7进行选频。经I8加到拉杆天线向空中发射出去。
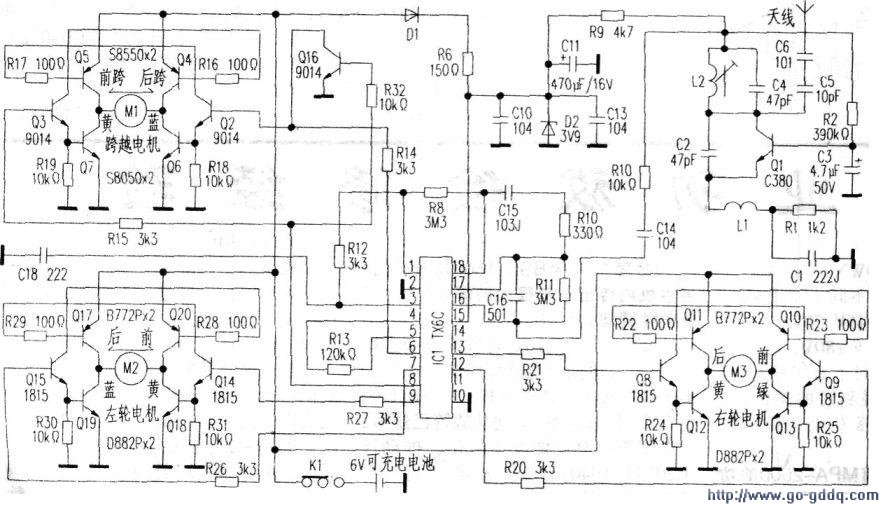
3.接收与驱动电路工作原理
电路如下图所示。由Q1、L1、L2、C2、c4、Rl、R2组成超再生接收电路,解调后的编码脉冲从Q1集电极电阻R9下端引出,经R7、C14加到lCl(16)脚。IC1型号Rx6C,也比Rx一2B多两个引脚,编脉冲进入(16)脚后,利用(16)、(17)脚和(18)、(1)脚内部用于信号放大的反相器进行两级高倍放大。
其中Rll、C16为第‘级放大器反馈元件。R10、C15为两级耦合元件,R8为第二级放大器反馈元件。放大后的编码脉冲由(1)脚输出,经R13加到(3)脚。由内部解码器进行解码。再经运算、锁存。
还原出前、后、左、右及向前跨越、向后跨越6个动作方向的高电平控制信号,由相应的(6)、(7)、(8)、(9)、(12)、(13)脚输出,通过3组驱动电路,控制3个电机,实现上述6个动作方向的遥控。由于这款玩具负载较重,故将Ql 1、Q19等8只小功率驱动三极管,换成中功率三极管B77P和D882P。
4.“探测者”前、后、左、右动作的特点
“探测者”4个基本动作原理与一般遥控赛车有很大区别,后者均为由一一个电机驱动两个后轮,实现前、后动作,再由一个转向电机与支杆等组成转向机构,控制两个前轮的转向,转向角度较小,最大也超不过200,因此在转弯处要形成较大的转向半径。而“探测者”是用黼个电机分别驱动两个后轮。而且左转、右转与其他玩具差别很大,例如左转是让左届轮驱动电路停止驱动,山右后轮的旋转来实现左转,右转则是停止右后轮的驱动,通过驱动左后轮的旋转安现右转。这种转动方式的优点是转向半径小,从而可以实现“就地”转弯。以便使“探测者”能够适应在狭窄的空间环境中运行。
5、探测者”跨越动作工作原理
前轮和后轮之间有一个轮子叫跨越轮。
它与后轮是通过旋转臂相连。出后轮轴齿轮带动,并使其与届轮同向旋转,因后轮直径大。而跨越轮直经小。为此旋转臂中平行排列安装5个齿轮。其中后轮轴齿轮有26个齿。中间3个传动齿轮均为24个齿,跨越轮轴齿轮为17个出。
这样当后轮旋转一周时,而跨越轮“f旋转删多,以此保证阿个轮子的线速度相等,相等。会因跨越轮的速度比届轮慢,将在前、后及左、右动作中起不利的制动作用,造成玩具动作灵活性降低和影响玩具的使用寿命。
旋转臂的驱动电路由Q2-Q7、016组成,工作原理。与其他驱动电路相同,但有一点不同的是,在Q2基极增加了一个由Q16构成的反相器,而且是由ICI(8)脚同时控制Q16和Q3,(6)脚控制Q2。由分析可知,当(6)、(8)脚同时为高电平或低电平时驱动电路不一作,只有两脚电平相反时驱动电路才丁作当(8)脚为高电平、(6)脚为低电平时。流经跨越电机Ml电流方向是,蓝线进入,黄线流出,Ml旋转的方向为向前跨越。反之,为向后跨越,当M1旋转方向为向前跨越时,驱动旋转。
臂前旋转,按图J0所示为顺时针旋转。使跨越轮对地而产生压力,在地面反作用力下,使前轮抬起来。并在跨越轮和后轮的向前驱动下。如同人类抬起脚步向前跨越动作一样,跨越障碍。旋转臂每向前旋转一·周,”探测者“就跨越个障碍。如果连续向前旋转。则连续向前跨越障碍。同理,当旋转臂向后旋转时,按上图所示,旋转臂逆时针旋转,即可实现向后跨越障碍的动作。