・上一文章:奥迪A4L轿车启动困难故障排除
・下一文章:汽车前轮定位参数的重要性
2 猎豹CS10网络通信的具体实现和主要特点
采用德国Vector公司的CANoe(CAN Open Environment)、CANscope等专业工具进行设计和开发,开发划为3个阶段:①功能建模和仿真;②系统部分的实现;③整个系统的集成。用CANoe建立仿真模型,在仿真模型基础上进行ECU的功能评估。综合使用这些专业工具对CAN网络通信的正确性、可靠性、合理性进行多角度全方位的评估;定位故障、解决CAN和LIN总线应用的各种问题,确保各项性能指标符合设计要求。
CAN、LIN总线主要性能指标包括:网络负载率、吞吐量、平均信息时延、通信冲突率、网络利用率、网络效率、负载完成率、总线电阻、总线波形。CS10网络拓扑如图1所示。
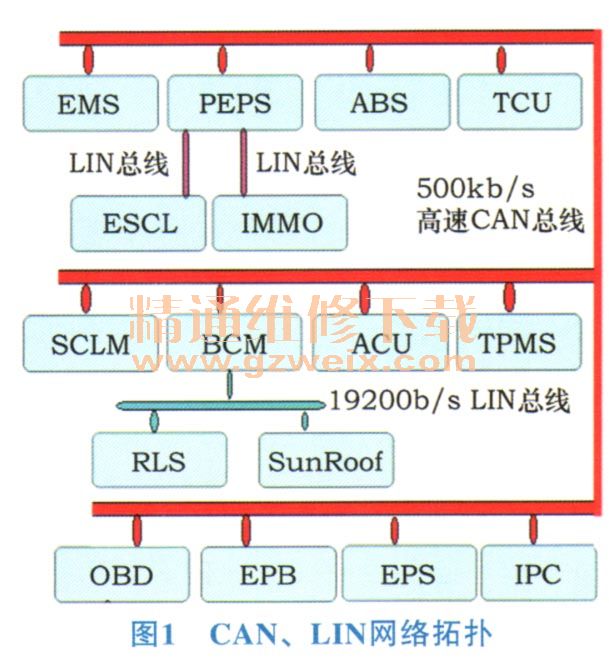
2.1网络技术应用
2.1.1 CAN总线
CAN总线采用11位标准ID,通信速率为500 kb/s 、动力系统和车身控制系统共用总线,没有采用网关。支持应用层协议和规范有:①OSEK网络管理规范的直接网络管理;②UDS用于车辆投放市场后的诊断,可通过UDS读取诊断信息、进行系统升级;③ CCP用于开发阶段的控制参数标定。
图2为CAN总线标准帧报文,实际上还有以下5种报文,用于满足特定的信息传输需求,如:①数据帧:发送节点向接收节点传送数据的帧;②远程帧:请求发送具有同一识别符的数据帧;③错误帧:节点检测到总线错误就发出错误帧;④过载帧:在先行和后续的数据帧(或远程帧)之间提供一附加的延时;
⑤帧间隔:将数据帧及远程帧与前面的帧分离开来帧。

2.1.2 LIN总线
LIN总线通信采用LIN 2.1协议,通信速率为:19 200 b/s,一共3条总线:BCM、RLS、SunRoof一路;PEPS、ESCL一路;PEPS与IMMO基站一路。
CAN、LIN网络拓扑如图1所示。其中BCM、RLS、SunRoof三节点组成LIN网络:所有报文的头部由BCM发出,BCM任务是主任务,也就是总线行为由BCM调度,不同ID的响应部分由对应节点的从任务发出。LIN总线通信过程如图3所示。

BCM、RLS、SunRoof的LIN总线标准帧报文格式如图4所示。总线包含以下6种报文满足特定的信息传输需要:①无条件帧(Unconditional frame):主任务发出报头,一个任务响应,一个或多个任务接收;②事件触发帧(Event triggered frame):增强LIN总线的响应能力,避免为了很少发生的事件而对节点进行轮询,从而浪费了大量的带宽;③零星帧(Sporadicframe):共用一个时间隙,在需要时由主任务发送报头和响应;④诊断帧(Diagnostic frame):用来传输诊断或配置信息;⑤用户自定义帧(User-definedframe):可以传输任何信息,由用户自己定义;⑥保留帧(Reserved frame):标识符为63(0x3f)的特定帧。






