来源:汽车维修与保养 作者:佚名 2021-12-29 08:24:52
4.超声波传感器基本结构原理
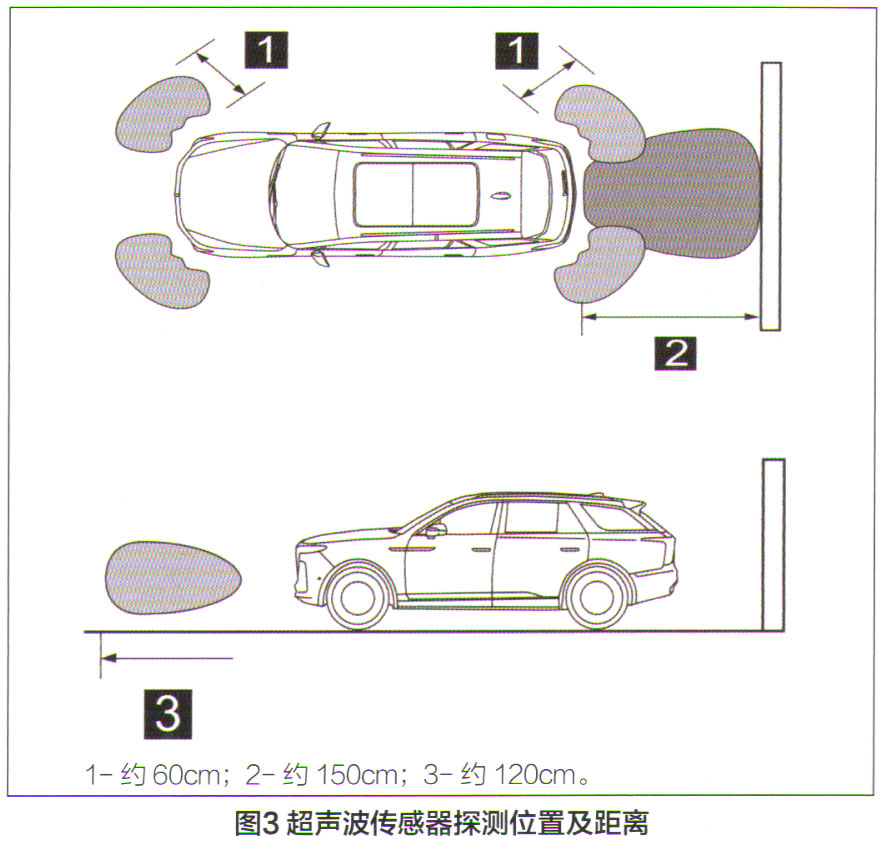
倒车雷达采用超声波测距原理,利用安装在前、后保险杠上的超声雷达探头,探测周围环境,检测车辆与障碍物的距离,进而改变报警界面上的显示信息和报警声提醒驾驶员注意。图3为超声波传感器探测位置及距离,各种车型的探测距离略有差别。
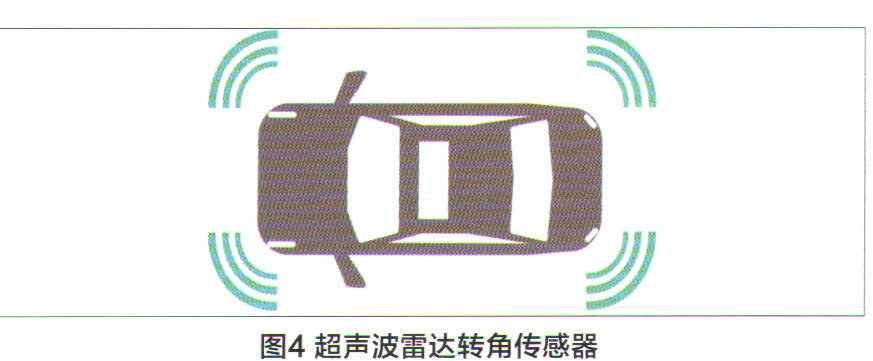
转角传感器和中央传感器监控车辆附近的物体,蜂鸣器、驾驶员信息界面和多功能综合信息显示屏显示车辆和障碍物之间的大致距离,大约在60m内,或更短距离(图4)。根据障碍物形状的不同,雷达传感器的检测范围可能会有变化。
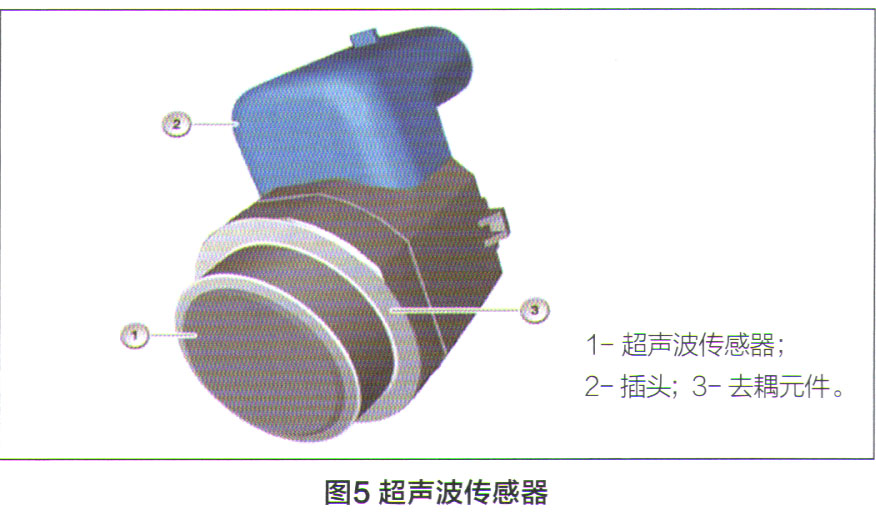
前后保险杠内的超声波传感器(图5)在电气和
AT可形状方面都是相同的。超声波传感器有一个较小的膜片,该膜片均已上漆。通过传感器外壳上的分隔元件,可采用结构上较小的膜片。
超声波传感器发射超声波脉冲,障碍物反射这些超声波脉冲(回声脉冲),超声波传感器接收并放大这些回声脉冲,接着这些被放大过的回声脉冲被转换成一种数字信号。
去藕是专指去除芯片电源管脚上的噪声。该噪声是芯片本身工作产生的。在直流电源回路中,负载的变化也会引起电源噪声。去藕的基本方法是采用去藕电容。
每个超声波传感器都有一套自己的电子装置以及自己的一根连接相应控制单元的数据导线。
相应控制单元在打开点火开关时将当前的车辆数据提供给超声波传感器(工作存储器)。超声波传感器被泊车辅助系统控制单元置于组合收发模式或纯接收模式。
上一页 [1] [2] [3] [4] [5] [6]
")
")
")
")

