来源:汽车维修与保养 作者:佚名 2021-08-15 09:35:18
四、前方防碰撞辅助系统的应用
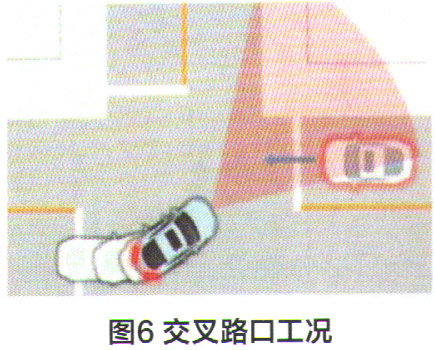
本文介绍的前方防碰撞辅助系统是现代起亚汽车集团凯酷汽车的前方防碰撞辅助系统。凯酷的前方防碰撞辅助系统主要分为四种工况,分别为车对车、车对人、车对自行车和交叉路口。中国新车评价规程(C-NCAP)在2021年新规中对于前方防碰撞辅助系统中也加入了自行车防撞。
凯酷使用的方案是摄像头和毫米波雷达集成判断的解决方案,车载摄像头使用单目摄像头,探测距离约为55m,该摄像头的主要作用是识别前方不同的物体并做出判断,该摄像头的探测角约为50°,毫米波雷达可探测前方约50m范围的障碍物。其四种工况的示意图如图3~6所示。
摄像头识别出前方物体为车辆、行人或自行车时,通过毫米波雷达和摄像头综合估算的距离计算制动减速度,如果距离较远,在汽车仪表盘上将出现警示图标同时报警器发出报警的声音,凯酷汽车的方向盘同时会振动来提醒驾驶员。若驾驶员此时仍然未松开油门踏板或未踩下刹车踏板,此时车辆将计算制动减速度来进行减速。如果车辆前方突然出现目标物,则直接进行紧急制动。针对检测出行人的制动工况的制动效果要优于检测出车辆的制动工况的制动效果,车对人工况制动后的预留安全距离应当大于车对车工况制动后的预留安全距离。制动效果优先级为:车对人>车对自行车>车对车;预留安全距离应该为:车对人>车对自行车>车对车。凯酷针对交叉路口工况进行了系统设计,如果检测到对向车辆在转弯或直行,而此时驾驶员并未松开油门踏板或进行制动时,车辆将自动进行制动。
随着多传感器融合技术的发展、控制单元计算能力的提升以及执行机构的优化,前方防碰撞辅助系统正在朝着多先进传感器融合、高精度判断、精确控制的方向发展,进一步提高车辆的主动安全性能,从而减少车辆碰撞的可能性。
关键词:


")
")
")
")

