・上一文章:纯电动教练车动力系统匹配设计与试验
・下一文章:检修天籁前照灯、驻车灯、尾灯、前雾灯开钥匙后一直亮故障
1)多普勒效应:对于反射发射出来的波的物体来讲,它相对于发射出波的物体是处于静止状态还是运动状态,是有本质区别的。如果发射出波的物体与反射波的物体之间的距离减少了,那么反射波的频率就提高了,反之若距离增大,那么频率就降低。多普勒效应在日常生活中的应用如图7所示,当消防车或救护车驶近时,其报警声听起来是一种持续的高音调(高频),当消防车或救护车越走越远时,我们听到的音调就降低了(低频)。
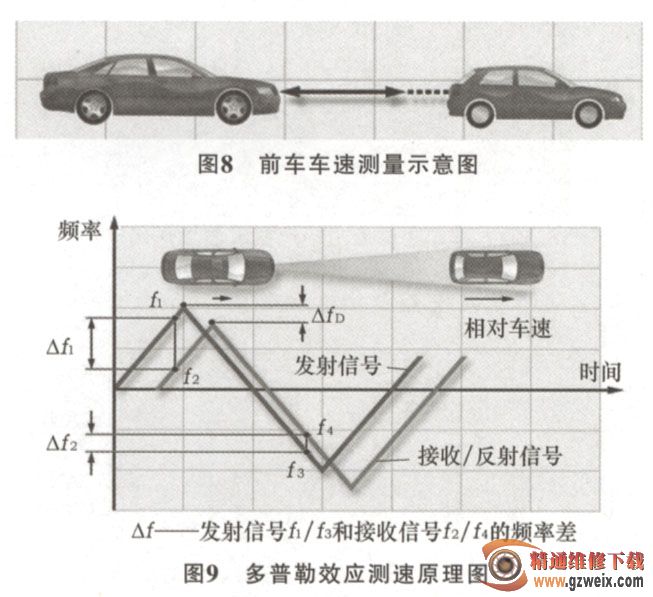
2)图8为前车车速测量示意图。运用多普勒效应,前车速度提高,与后车的距离增大,接收(反射)的信号的频率就降低了,反之,前车速度降低,与后车的距离减少,接收(反射)的信号的频率就增加了。多普勒效应测速原理如图9所示,由于会导致在信号的上升沿和下降沿之间产生一个不同的差值,车距调节控制单元会分析这个差值,从而判断前车的速度变化。
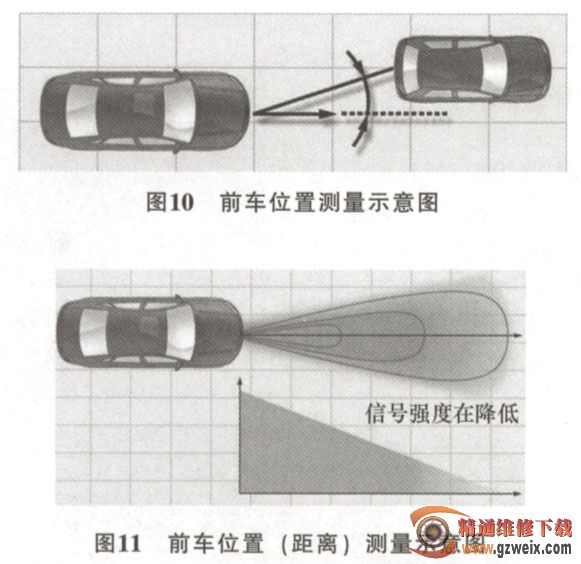
2.3前车位置测量
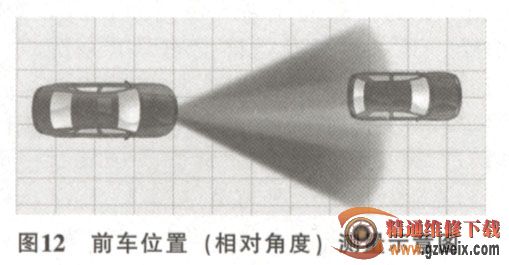
1)前车位置测量示意如图10所示。雷达探测信号以叶片状向外发射,信号的强度随着与车上发射器距离的增大而在纵向和横向上降低,如图11所示。
2.4跟踪车辆的选择
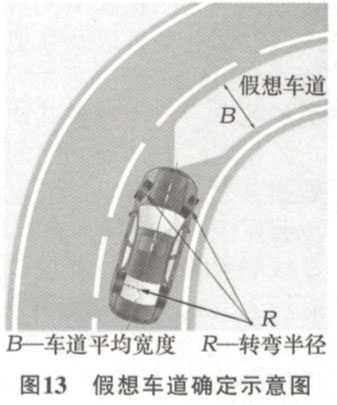
在实际行车中,车距调节控制单元对检测到的车辆侧倾、车轮转速、转向盘转角等信号进行分析,把雷达检测到的距离本车最近的物体作为车距调节的参照物,根据汽车的转弯半径和特定的车道平均宽度来确定一条假想的车道,如图13所示。
")
")
")
")

