・上一文章:谈汽车维修技师素养及诊断随想(上)
・下一文章:广州丰田汉兰达燃油泵改良
在车辆中的两个头灯控制单元独立工作。每个头灯控制单元有单独的软件和硬件需要计算所需的参数。功能有自动范围调整、静态弯道灯和动态弯道灯,由头灯控制单元进行计算并由连接到的灯泡/执行器执行。灯光主控单元发布命令启动灯光。
动态弯道灯:

动态弯道灯(如图64所示)在速度大于2km/h时便会启用。车灯控制系统最多可将大灯向一侧旋转15°(外侧车灯组件为15°,内侧车灯组件为7.5 °),具体取决于车辆入弯时的转向角和车速。光束会最大范围地照射到路面上,同时不致使对面来的车驾驶者感到炫目。因此,当夜晚行驶在多弯道路上时,驾驶员可更早看清道路走向和发现任何障碍物,从而可对其驾驶方式进行相应调整。当行驶在乡村道路以及高速公路长弯道时该特点还可以以最佳方式照亮这些弯道,从而显著提高安全性。双氨气大灯的近光灯随驾驶员的转向动作而移动,并不断根据当时的行驶速度进行调整。传感器不断记录行驶速度、横向加速度和转向角,并使用此信息计算弯道的过弯弧度。控制单元将使用接收到的数据确定控制动态弯道灯的最佳角度。远光灯打开时弯道灯仍将保持启用状态,让驾驶员看得更加清楚。
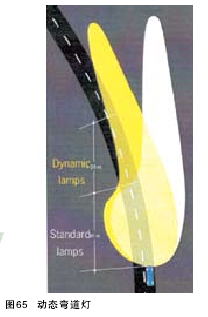
转向角度、车辆速度和偏摆率作为输入数值来控制动态弯道灯(如图65所示),它整合在双氨气灯光单元。提供了在车辆转弯时适宜的道路照明,道路和路线及任何障碍物可以更早地被检测到。
动态弯道灯在下列状态下启动:
.近光灯ON或光线传感器检测到灯光需要打开
.车辆速度大于2km/h
.发动机速度大于600r/min
.步进电机的参考值给出了需要的反馈
系统使用相关的数据,如车辆速度、偏摆速度(车辆绕中垂轴的速度)和转向角度来计算转变特性。控制单元计算适宜的弯道照明角度。使用电子步进电机工作操作头灯水平旋转。由于两个光锥分别独立没有聚集到一点,这提供了更好的道路表面照明。
每个步进电机通过接头连接到头灯控制单元,头灯控制单元计算步进电机必须移动所需要的位置,并且送信息给电机。如果步进电机故障和功能失效,故障存储在故障记忆中并且开始相关紧急操作功能。
在初始化阶段,头灯控制单元检查登记的步进电机数量,如果检测到不同,会存储错误信息。
静态弯道灯:
静态弯道灯的功能是照亮车辆前部和侧面的邻近区域,这是通过分散灯光并且将主要灯光的光线进行平滑的连接达到的(如图66所示)。头灯控制单元通过CAN网络接收输入数值计算静态弯道灯灯泡所需要的数值。

静态弯道灯会启用另一个与行驶方向大约成30°(由转向角度控制)光速角度的卤素光源。在车辆静止以及高达130km/h的车速行驶时,可通过转动方向盘来启用静态弯道灯。因此,会照亮道路边缘外较广的距离。
静态弯道灯在下列状态打开:
.近光灯ON(通过灯光开关)或光线传感器检测到需要打开灯光
.方向盘角度旋转至少2°
.参数速度在范围内
.TerminalKL.15模拟信号为ON
.TerminalKL.15的CAN信号为ON
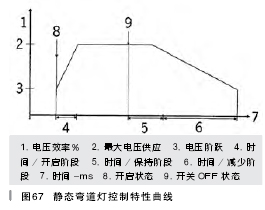
静态弯道灯刚开始开启时,电压供应从0%阶跃到30%电压按照斜线从30%调节到100%关键的是,陡峭的斜线(阶段4)用来在开启阶段增加电压,这样一来增加了照明亮度。电压减少使用平坦的斜线(阶段6),降低了照明亮度(如图67所示)。
照明亮底调整特性依赖于不同的信号:
.转向角度
.转向角度改变率
.车辆速度
.左/右转向灯启动
.选择倒挡
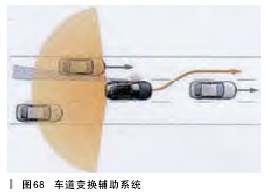
车道变换辅助系统(LCA)
车道变换辅助系统是一个车辆辅助和舒适系统,它可通过保险杠左右两侧安装的两个雷达传感器监控车辆后面最近70m处左右两侧的车道,包括盲点。这可增强驾驶舒适性和安全性,尤其是在高速公路上行驶时(如图68所示)。
")
")
")
")

