・上一文章:新能源摩托车的国内外发展趋势研究
・下一文章:150坐式摩托车偶尔发突、之后就突然熄火
2 摩托车虚拟样机的开发流程
虚拟样机设计的开发过程是以人为中心的,对产品外观、性能的优化设计过程。它将分布的、来自不同学科领域的模型集成在一起,进行并行协同设计工作,在制造物理样机前实现外观、性能评估,将设计缺陷尽可能的消灭在物理样机制造之前,最大程度的提高设计质量,摩托车虚拟样机设计开发流程如图4所示,主要分为下面几个阶段。

a)摩托车虚拟样机的系统设计及方案论证。
b)出效果图,按确认的效果图进行实物样车油泥造型(见图1)。

3 关键零部件的建模技术
要建立摩托车虚拟样机,首先须对摩托车的各关键零部件建模。摩托车主要包括发动机、车体、操纵系统、悬挂系统、行走系统、制动系统、电器系统及外覆盖件,如表1所示。
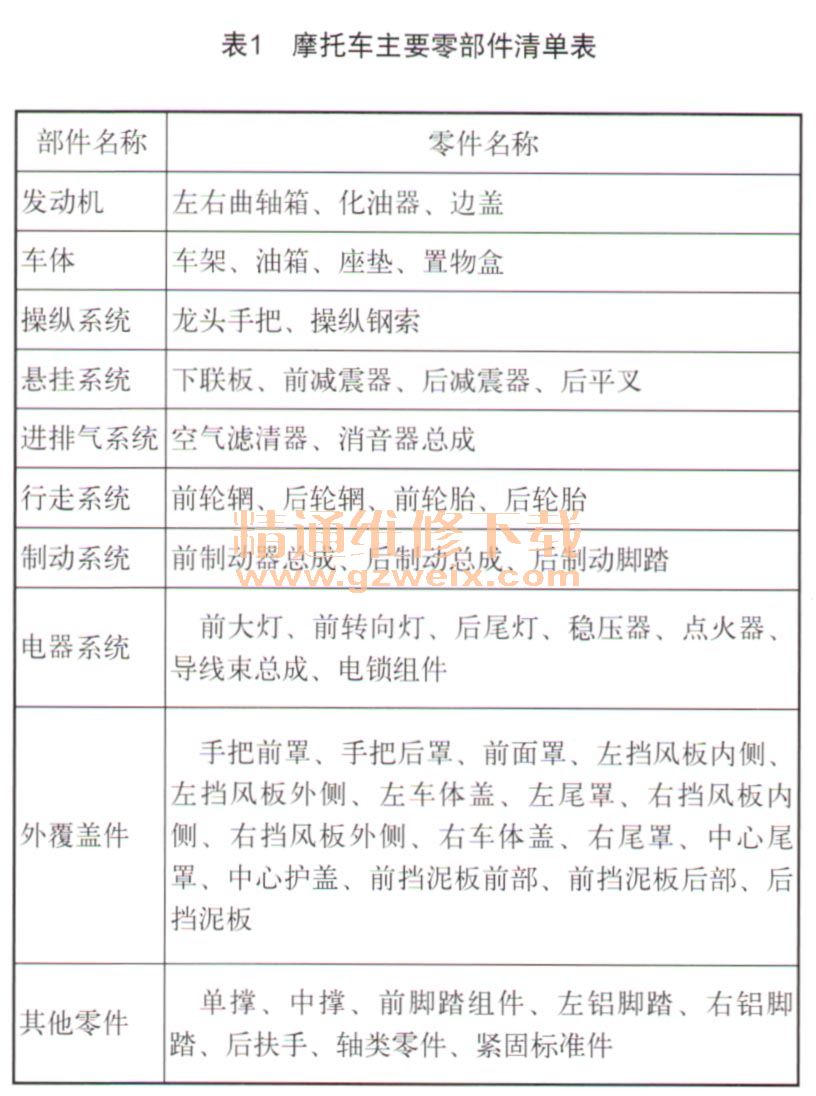
对于摩托车的各零部件,采用Creo进行实体建模;因本款摩托乍的外覆盖件比较多,曲面造型亦比较复杂,对其采用UG建模。
3.1数据采集
对摩托车的各零部件建模的前期工作是对油泥样车进行数据采集。本款车型主要是采用ATOS流动式光学测量仪进行数据采集。
ATOS流动式光学测量仪(ATOS 1350 XL)TRITOP数码照相定位系统)是德国“GOM”公司最先进的光学侧量设备,采用投影光栅法进行数据采集。投影光栅法是一类主动式全场三角测量技术,测量时系统采用普通白炽光带将正弦光栅或矩形光栅投影于被测物面上,根据2个CCD相机摄取变形光栅图像,再根据变形光栅图像中条纹像素的灰度值变化,解算出被测物面的空间坐标,这类测量方法具有很高的测量速度和较高的精度,测量速度可大干43 000点/秒,单帧精度为1 0.03 mm,整体测量精度好于0.1 min/m。ATOS流动式光学测量仪选配多个测量头,测量适用性特别强,测量领域从发动机小部零件到摩托车整车的整体外覆盖件。
本款摩托车的数据采集过程为:
a)在油泥样车表面喷显像剂,细节特征处喷涂均匀;待显像剂干后再选择性地粘贴ATOS系统专用参考点TRITOP系统专用数码点、比例尺。
b)用TRITOP专用数码相机拍摄,每张影像至少拍5个数码点,再经TRITOP软件处理后输出工件上参考点的空间位置坐标。
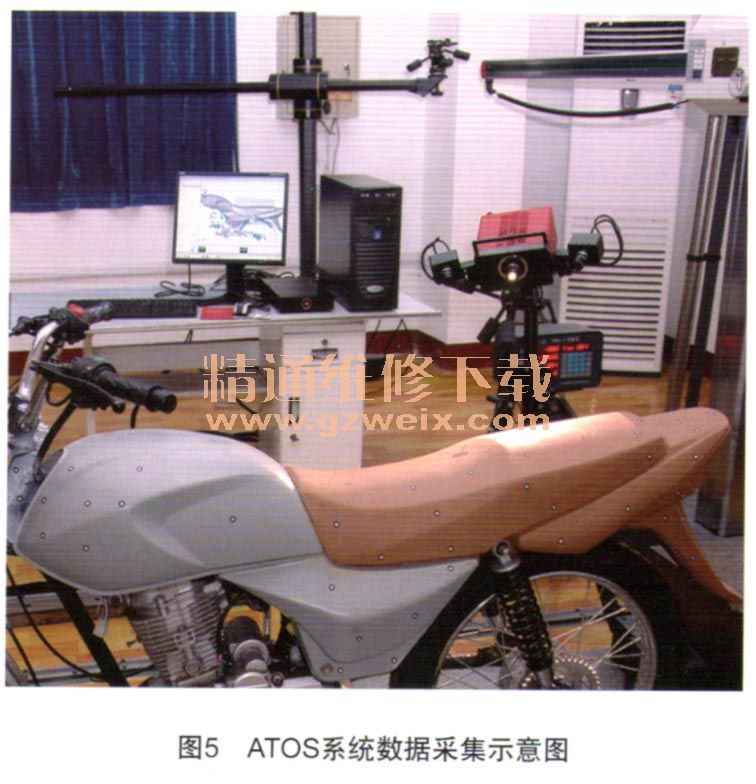
c)将参考点的空间位置坐标输入到ATOS软件系统中,进行ATOS扫描,此时ATOS可以从任何识别的参考点开始,不但扫描速度快,而且精度高,如图5所示。
d)将ATOS扫描的整车点云进行处理并输出成Stl格式。
e)采用Imageware等软件对点云数据进行预处理。主要是对点云进行降噪、除杂、过滤、边界提取、拼接等,这是由于ATOS系统对光线比较敏感,因此在测量中会产生噪声点而影响到曲线、曲面的生成和测量数据的准确性,必须通过全方位观察,去除点云数据噪声点。
完成整车点云数据采集后,需对主要零部件进行数据采集,然后进入3D建模阶段。

")



