・上一文章:飞利浦46PFL3 800T3液晶彩电不开机故障检修
・下一文章:一种新型三轮摩托车发动机曲轴滚针润滑结构
2 电动换挡传动机构的设计
2.1电动换挡传动机构的基本结构及原理分析
考虑到摩托车换挡过程以及舵机能够精确控制其转角的特性,设想通过四杆机构利用舵机的转动带动换档轴的转动,来实现换档动作,从而代替驾驶者通过脚巨或手上的动作使换挡轴转动完成换挡。设计的换挡传动机构的基本结构如图2所示。
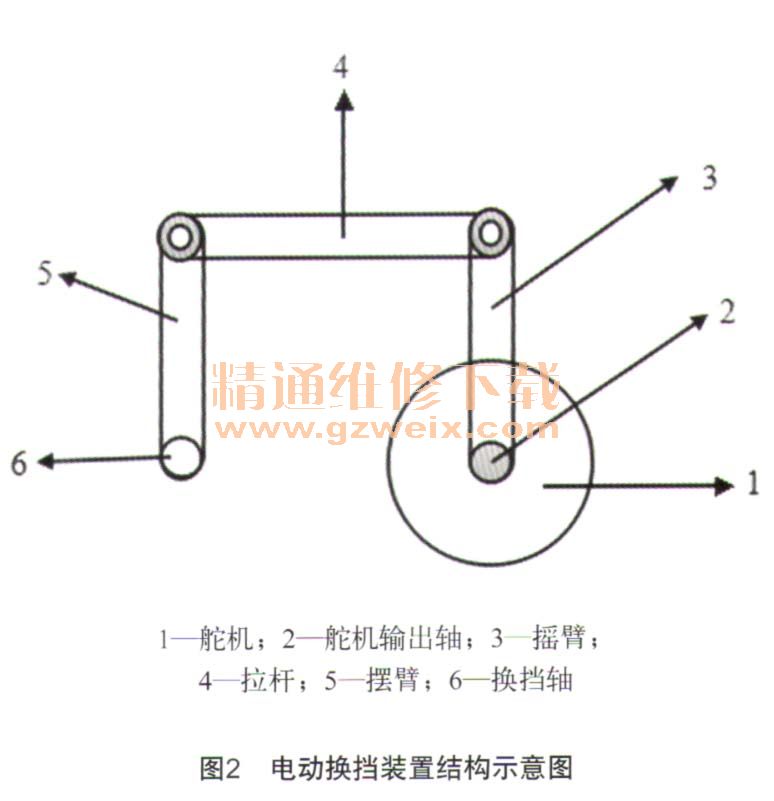
该装置中舵机的输出轴2和摇臂3是通过D型轴固定连接,拉杆4的两端分别和摇臂3、摆臂5通过铰链连接,相对之间能进行转动,摆臂5和换挡轴6通过花键连接,舵机则是利用控制器通过两个按键或换挡拨片来控制其正转和反转。其工作的基本原理是:舵机输出轴的转动带动摇臂转动,通过拉杆使得摆臂摆动,从而带动换挡轴转动,实现换档动作。控制舵机的正反转,可以实现升、降挡。其在摩托车实体上的一种安装方式如图3所示。

2.2四杆机构的设计及摇杆转动角的确定
考虑到舵机及四杆机构有安装空间和安装位置的限制,在四杆机构的设计过程中,要先根据舵机的安装位置及允许的空间来确定各杆的长度,各杆的长度要满足构成双摇杆机构的条件,即最长杆长度+最短杆长度(其他两杆长度之和,取最短杆的对边为机架时或最长杆长度+最短杆长度>其他两杆长度之和,此时不论以何杆为机架,均为双摇杆机构。而在确定各杆的长度时,如果不能布置成图2所示的平行四边形四连杆机构,为保证顺利的完成换挡,摆臂的极限转角要大于等于2倍的换挡所需要的角度。假如各杆的长度、布置形式及运转简图如图3所示,其极限转角分析如下:
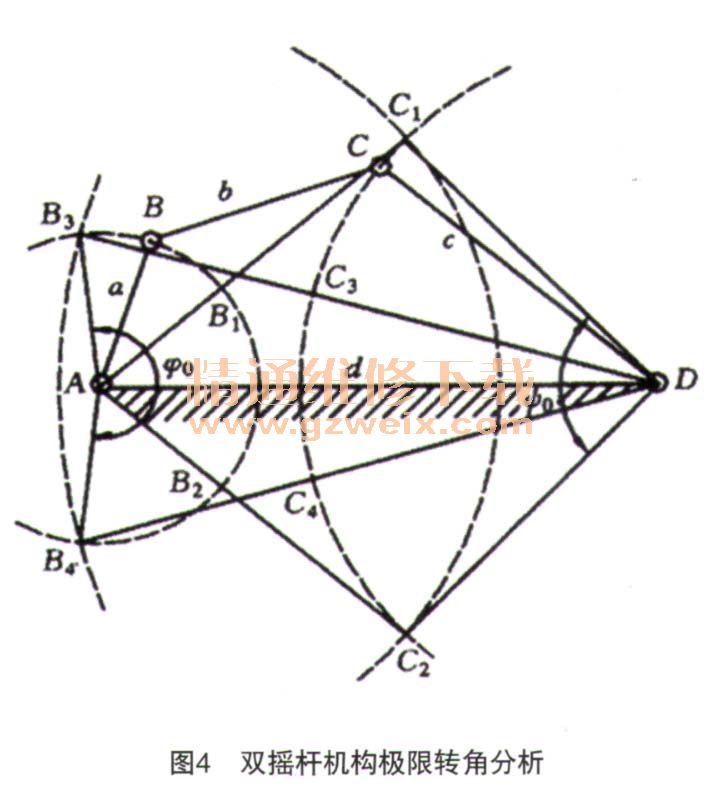
a)CD与BC拉直共线时,AB处于两极限位置AB3、AB4,
b)BC与AB拉直共线时,CD处于两极限位置C1D、C2D
AB为主动摇杆时的极限摆角为:
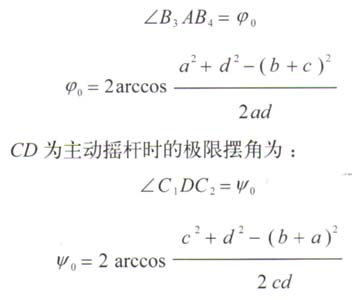
为了保证能完成换档,式中的ψ0或ψ0应大于等于两倍的测得的完成换挡的换挡轴的转角在四杆机构确定之后,接下来要根据完成换挡摆臂需转动的角度,采用图解法确定摇臂所需转动的角度,为后面编程确定舵机转动的角度做准备。

")



