・上一文章:长虹平板彩电机芯机型对应电源组件、屏速查表(五)
・下一文章:小型高地隙喷药机发展现状及前景分析
摘要:为了对优质青枣进行分拣,解决人为分拣青冬准确度低、效率差等问题,提出了基于图像识别的由Ar-duino控制的多自由度机械手,实现在流水线上对炭疽病青枣的分拣:该系统以Arduino控制板作为主控制器,结合Pixy图像识别传感器、MG995舵机和图像识别算法组成自动分拣机械手系统。通过Pixy图像识别传感器对传送线上的青枣图像进行采集,并分析获取获得青枣的大小、颜色等特征量,得出青枣的品质信息。然后由Arduin。控制器控制分拣机械手动作对青枣进行分拣。实验结果表明,通过该方法对炭疽病青枣进行分拣,准确率可达80%以上。
0 引言
海南青枣作为一种营养价值极高的亚热带水果,近年来市场需求量急剧攀升,其产品的精深加工成为新形势下的发展重点。在这样的形势下应将提高青枣产品品质作为提高竞争力的关键。因此,青枣的产业化发展成为促进海南农民增收的重要手段之一,而对炭疽病青枣的分拣是青枣产业化过程中提高果品质量的关键技术,对提高开箱合格率、产品附加值和开拓国内外市场具有重要意义。
青枣是一种外形不规则、等级范围小、分级难度大的水果,当今国内对其分拣措施主要为人工挑选,准确率和效率无法得到保证。虽然目前市面上的工业机器人已经可以代替人工对大部分的产品进行分拣,但由于缺少对产品质量等级的识别功能,这种方法并不能对不同等级的产品进行分级分拣。而拥有图像识别系统的机器人通过图像处理算法,可自动辨别水果质量等级,进而对其进行精确分拣。
根据市场需求,现研发了一种利用Pixy图像传感器对行青枣拍照进行颜色识别,流水线上有分拣灰褐斑的炭疽病青枣的机械手,该机械手具备多个自由度,由Arduino控制模块进行运动控制,动作灵活精确。另外,针对流水线上青枣的运动特点,该机械手设计有转动底盘,便于机械手快速且准确地夹取青枣。这样就可以在不破损农产品的同时,使其分拣工作更科学、更准确,可提高农产品加工品质,降低工人的劳动强度。
1 炭疽病青枣分拣机械手系统的组成和原理
该系统包括Arduino Mega 2560控制器、Pixy传感器、MG995舵机、机械手。系统工作原理为:Pixy传感器负责采集并识别青枣图像信息;Arduin。控制器作为机械手的控制核心,读取青枣等级数据并将其转化为各级舵机的指令,最后向MG995舵机发出PWM脉冲信号,舵机作为执行元件驱动机械手运动。程序将体积较小、灰褐色的炭疽病青枣定为劣质品,机器人负责把形状小且颜色为灰褐色的炭疽病青枣果从传送带上分拣出来,优质的青枣继续留在传送带上。
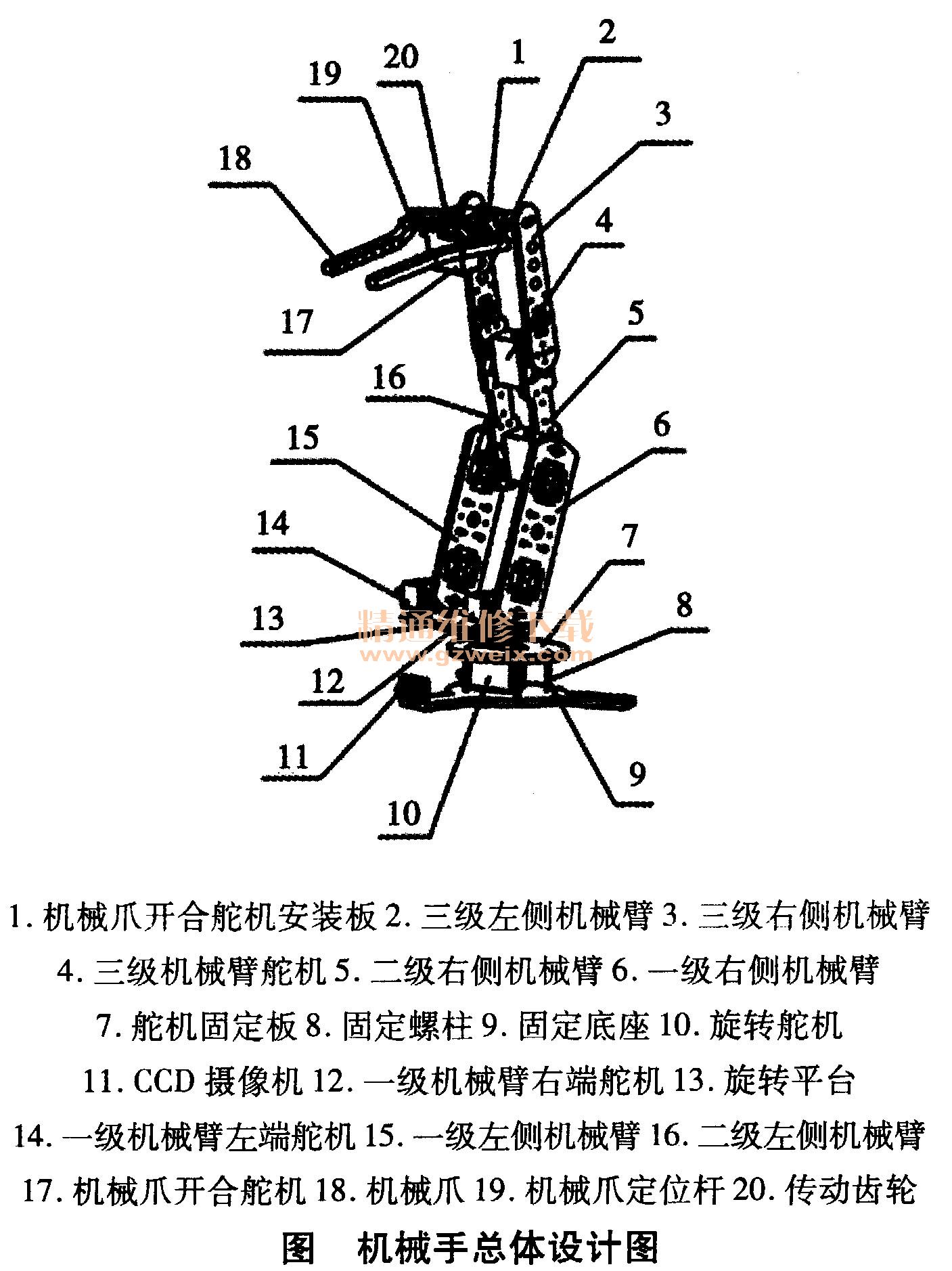
2 机械手的总体结构设计
机械手的种类很多,有直角坐标式、圆柱坐标式、球坐标式、关节坐标式等。本文设计的机械手采用关节坐标式,其结构尺寸小、动作灵活,适合分拣青枣等体积较小的水果。青枣分拣机械手的结构主要由机座、下段机械臂、中段机械臂、上段机械臂和机械爪组成。其中机座采用舵机驱动进行旋转,最大旋转角度为180°,机械爪同样由舵机驱动,由齿轮传动的方式进行同步开合,可靠性高。该机械手可实现折叠、左右旋转、夹取和投放等动作。其总体结构如图所示。