・上一文章:海尔LD32U3100型液晶彩电黑屏检修
・下一文章:矿用水介质单体液压支柱的研制与使用
摘要:开发一种能够用于牛舍自主充电与自主加水的轮式清洁机器人。阐述了牛舍清洁机器人的发展以及研究意义,对牛舍清洁机器人的总体结构进行设计,对超声波测距工作原理进行了详细介绍,并且构建环境模型,从而能够全天候的对牛舍进行清洁工作,时刻保证牛舍的清洁与卫生。
0 引言
现如今,科技发展迅速,机器人技术的发展更是广泛应用到社会、家庭的各个方面,自主式智能清洁机器人在目前服务机器人中最具有代表性,自主式智能清洁机器人的推广更是普遍,在自主式智能清洁机器人中,牛舍清洁机器人的问世,将会在未来无人作业牛舍清洁领域起到巨大的作用,牛舍、猪舍的清洁工作不但辛苦,而且气味难闻,工作人员若没有将其清洁干净,很可能会使奶牛患上乳房炎等疾病,因此为了使牛舍24 h保持干净与卫生,且节省大量的劳动力,设计与研究这类清洁机器人对社会生产的发展将会有着非常深远的意义。
1 牛舍清洁机器人的整体结构
牛舍清洁机器人系统主要包括机器人本体、牛舍的工作环境及需要做的清洁工作任务。
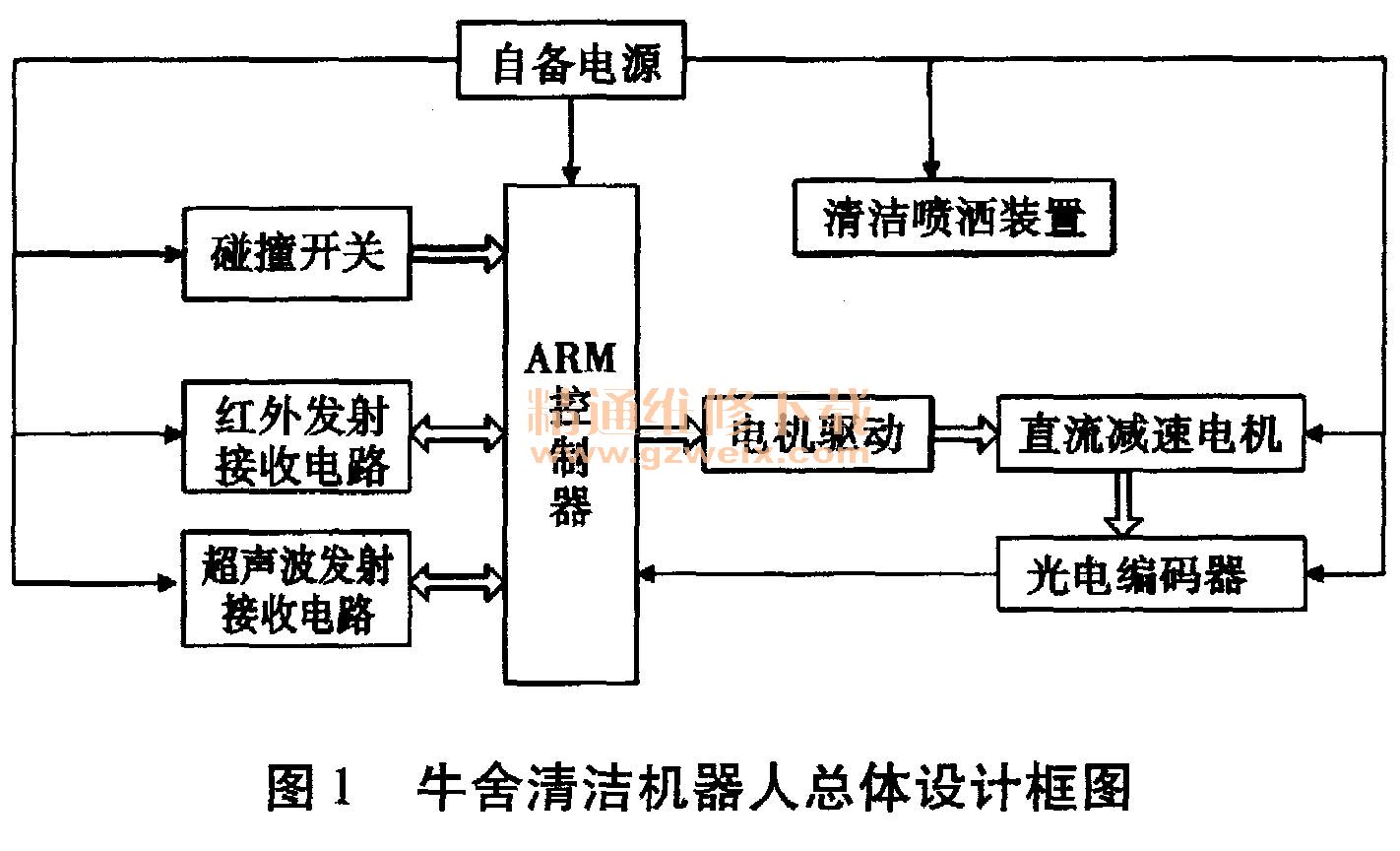
牛舍清洁机器人的结构主要包括传感部分、电源、控制系统、清扫喷水功能以及行走机构。控制系统主要包括行走驱动单元、运动控制单元、电源管理单元。行走机构包括车轮、电机与减速装置。清扫喷水功能包括泵、水箱、喷头和刮粪板。传感部分主要包括机身的超声波传感器及碰板,碰板系统是双自由度,其他的系统都是单自由度与牛舍清洁机器人机身连接。
牛舍清洁机器人的主要传感部件包括红外探测传感器与超声波传感器。红外探测传感器主要是通过红外波发射与接收,来检测出牛舍清洁机器人周围有无障碍物,从而避免牛舍清洁机器人与障碍物之间的碰撞。超声波传感器的作用是检测清洁机器人与墙或者牛栏等障碍物之间的距离,对于牛舍环境地图的建立有着重要的作用,最终确定清洁机器人在牛舍环境地图中的具体位置。碰撞开关是用来辅助传感器部件,当红外线检测不到某些障碍物的情况下,如障碍物比较小或者红外传感器对障碍物的颜色不敏感的时候,碰撞开关则会起作用,也是属于接触避障,直流减速电机本身所带的光电码盘是用在获取牛舍清洁机器人的速度和其距离信息,牛舍清洁机器人通过控制器实现对不同传感信号的检测与处理,分析并实现其行走路径的规划,通过牛舍清洁机器人的电机驱动电路来驱动两边的减速电机,从而带动牛舍清洁机器人的左右轮的转动,实现机器人自主移动的功能,同时,牛舍清洁机器人机身携带的水箱与刮粪板装置,通过不断的喷水进行软化牛舍的牛群粪便,刮粪板将其粪便刮至漏缝地板下,从而进行牛舍地面的清洁工作,牛舍清洁机器人的总体设计架构图如图1所示。
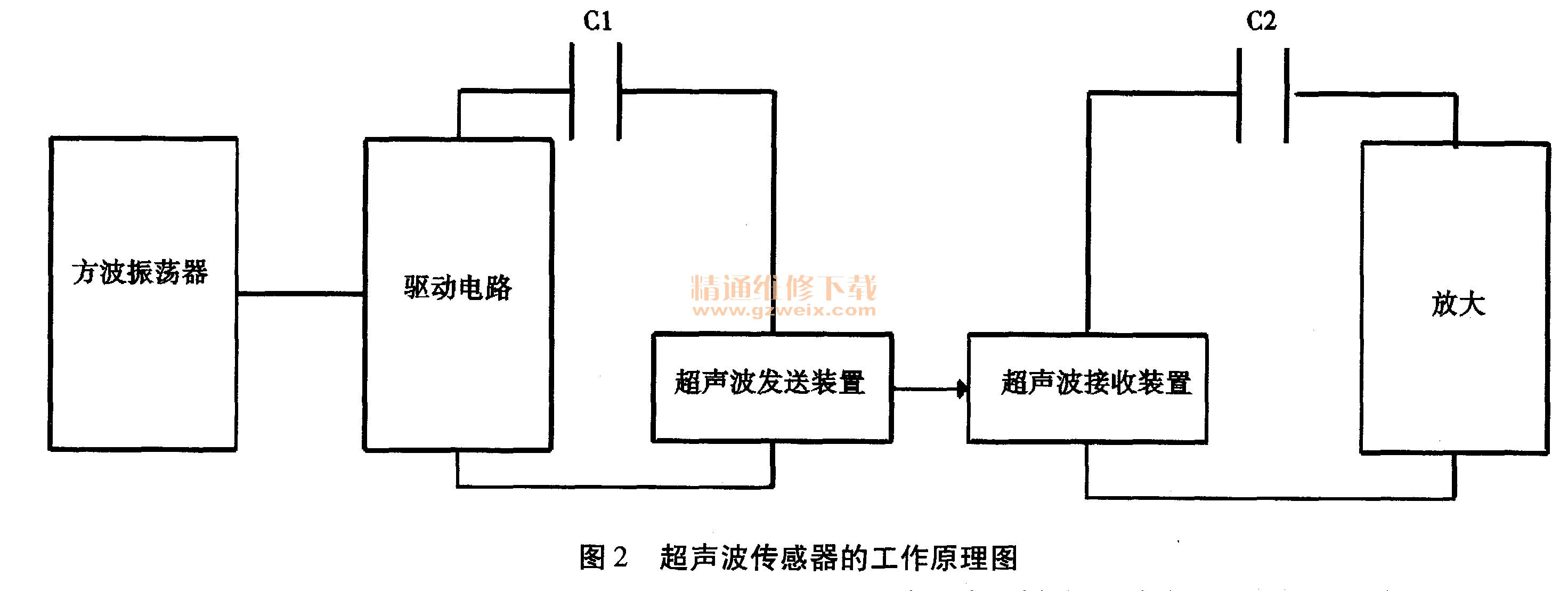
2 超声波传感器的工作原理
在我们身边,我们听到的各种声音,均是由物体振动所产生,振动的频率超过一定的范围值时,叫做超声波,振动的频率低于一定的范围值时叫做次声波。目前我们所常用的超声波频率很高,一般它的方向性好、穿透的能力强,且沿着直线型传播。超声波测量距离的仪器就是通过超声波遇到杂质或者分界面的时候产生反射波的这一特性研制而成,为了研制超声波测量距离的一种传感器,我们可以通过超声波传播的频率越高,反射能力越强的特性,超声波在空气中的传播速度很慢,我们可以通过测量其波的传播时间、测量距离或者厚度来进行应用。
超声波传感器主要的组成部件是压电晶片,可以接收
和发射超声波,压电陶瓷片或者石英晶片均可用来制作压电晶片,压电的陶瓷片的优点是其灵敏度很高,缺点是其热稳定性低,超声波传感器的核心是压电陶瓷晶片,除了压电晶片外,超声波传感器还包括金属网格和锥形辐射喇叭等组成,金属网格的作用是保护,锥形辐射喇叭的作用是发射与接收超声波,使其能量得以集中,超声波传感器在使用的时候包括反射式与直射式两种形式,当我们在发送装置双振子端施加电压时,通过逆电压效应来发送超声波信号,超声波接收装置通过正压电效应,对接收到的超声波信号进行放大处理。其工作原理具体如图2所示。