・上一文章:宝马X3行驶时多个报警灯点亮
・下一文章:车辆ABS/EBD/DYC/ESP控制技术
摘要:本语言介绍半自动泊车系统的系统构成和测试内容,以及实验室仿真测试系统的硬件和软件搭建方案;通过测试实例的执行和效果进一步阐述了该系统在实验室仿真测试中体现的优势和必要性。
高级驾驶辅助系统目前已经普遍应用于乘用车,并逐步变为乘用车的标准配置,其中半自动泊车系统是高级驾驶辅助系统的一个重要功能。泊车系统可部分替代驾驶员观察和判断,能够辅助驾驶员快速、准确、定位车位,整个泊车的过程中,驾驶员只需要按照系统的指示操作即可,并能够按照系统指示安全、方便泊入或泊出车位,提高了泊车的方便性,减少泊车事故。泊车系统控制算法较为复杂,需要采集多路雷达的数据信息,判断障碍物及车位信息,结合实际车速,并与EPS、TCU、IC等控制器协同控制实现泊车操作。研发过程中控制器的算法开发不是很完备,存在软件漏洞和策略错误等情况,并且泊车系统涉及到驾驶安全,因此在实车验证之前,必须在实验室进行仿真测试,对泊车系统的控制策略进行充分的测试,降低实车测试的风险。
1 半自动泊车系统
本文中所述的半自动泊车系统由控制器、短距和长距超声波雷达构成,通过超声波测量道路两侧的车位长度,选定适合的车位后,系统计算倒车轨迹并自动控制车辆的转向系统,将车辆停靠在选定的车位中,驾驶员只需按照仪表的声音或图像提示控制车辆的挡位切换、油门及制动踏板。半自动泊车功能由水平泊入、垂直泊入、水平泊出3个子功能组成,泊入时分为车位搜索、泊车引导2个阶段;泊出时只有泊车引导阶段。声音警示及系统操作提示通过仪表来实现,转向操作与EPS控制器配合完成,换挡操作由TCU控制器配合完成。
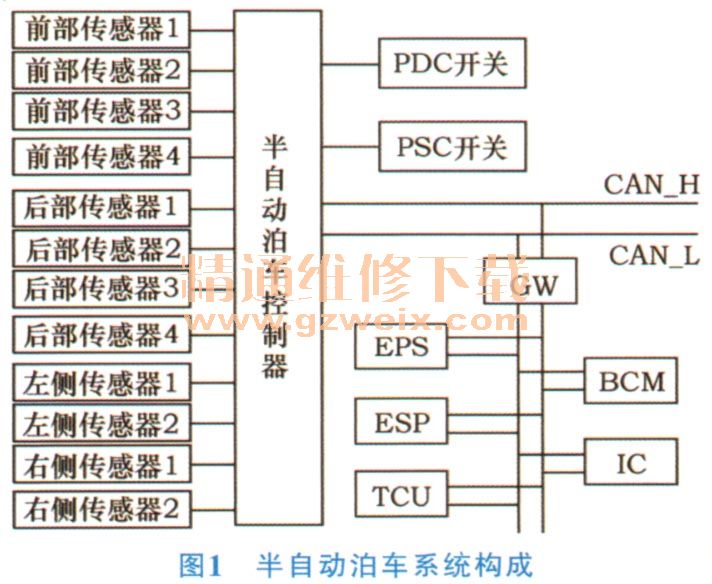
半自动泊车系统共包括12个雷达传感器,如图1所示,其中前4个和后4个为短距超声波雷达,主要探测前后距离,探测距离短;车辆两侧各有2个长距超声波雷达,探测距离长。根据超声波测距原理,控制器轮询各传感器发射和回波的时间差,内部经过滤波和运算,计算出实际可探测到的车位。
2 自动化测试应用
2.1自动化系统搭建
实验室仿真测试系统主要由实时仿真系统、试验管理系统、显示系统构成,其系统搭建示意如图2所示。其中实时仿真系统是自动化测试系统的核心,能够运行车辆动力学模型和交通场景模型,可以正确模拟真实的车辆及其动力系统工作过程和车辆的运行外部环境(交通场景、交通标志、建筑物等)。试验管理系统由上位机和运行于上位机的试验管理软件组成,通过以太网线连接至实时仿真计算机,从而实现对系统的总体控制。通过试验管理软件,可以实现模型设置编译下载、模型运行监控、读取车辆实时信息、在线调参和对整个仿真平台进行配置管理的功能。显示系统用来显示动画场景,实现人-机互动,提升虚拟驾驶体验。
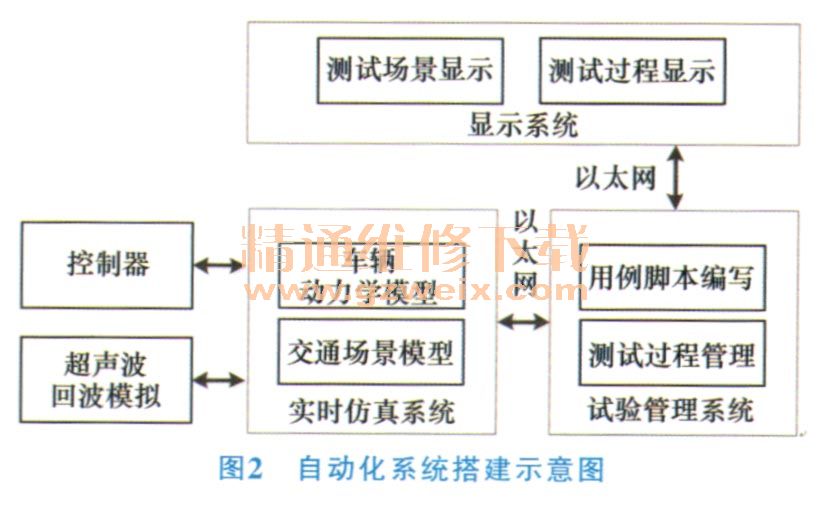
半自动泊车控制器通过超声波传感器发送超声波,同时接收反射后的超声波判断障碍物的位置。实验室仿真系统的难点在于仿真超声波信号,也是本实验室测试仿真系统搭建的关键。超声波回波模拟设备采用真实的超声波传感器与一个声音换能器一起布置,障碍物的距离信息由车辆动力学仿真软件通过硬件IO板卡发送到声音换能器中,声音换能器形成的超声波由超声波传感器传递到自动泊车控制单元中,即可模拟障碍物的距离信息。





