来源:汽车维修与保养 作者:佚名 2022-02-25 09:25:02
9.倒车雷达具体例举
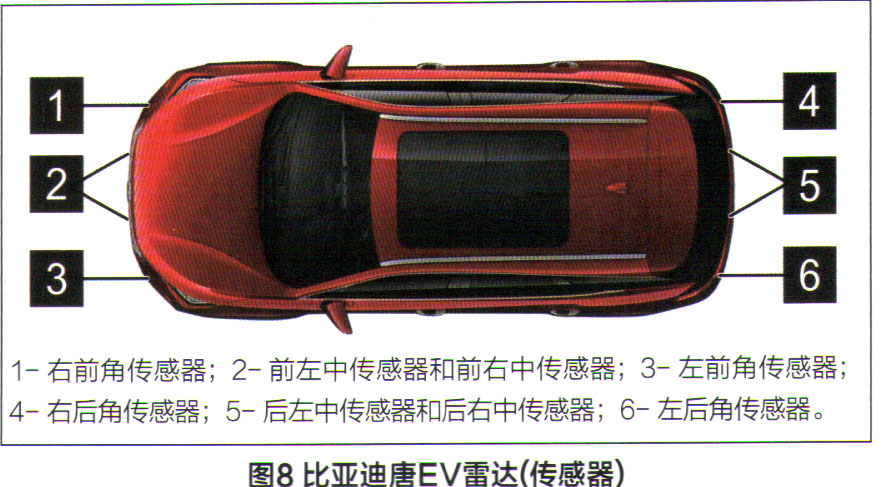
以比亚迪唐EV倒车雷达为例,说明其启用条件、探测范围、报警距离(图8)。
(1)车速范围
车速超过10km/h时,驻车辅助系统将停止工作。
(2)倒车雷达电源开关
①可通过倒车雷达开关或多媒体系统开启或关闭倒车雷达系统。
②电源挡位为“OK”挡情况下,
EPB为释放状态,驻车辅助系统自动开启。
③系统打开,车辆周围有障碍物时,整车有报警提示;系统关闭时,无报警提示。
(3)距离显示和报警显示
①进行纵列式驻车或移车入库时,超声波传感器可测量车辆与障碍物间的距离,并通过多媒体显示屏和扬声器进行传达。
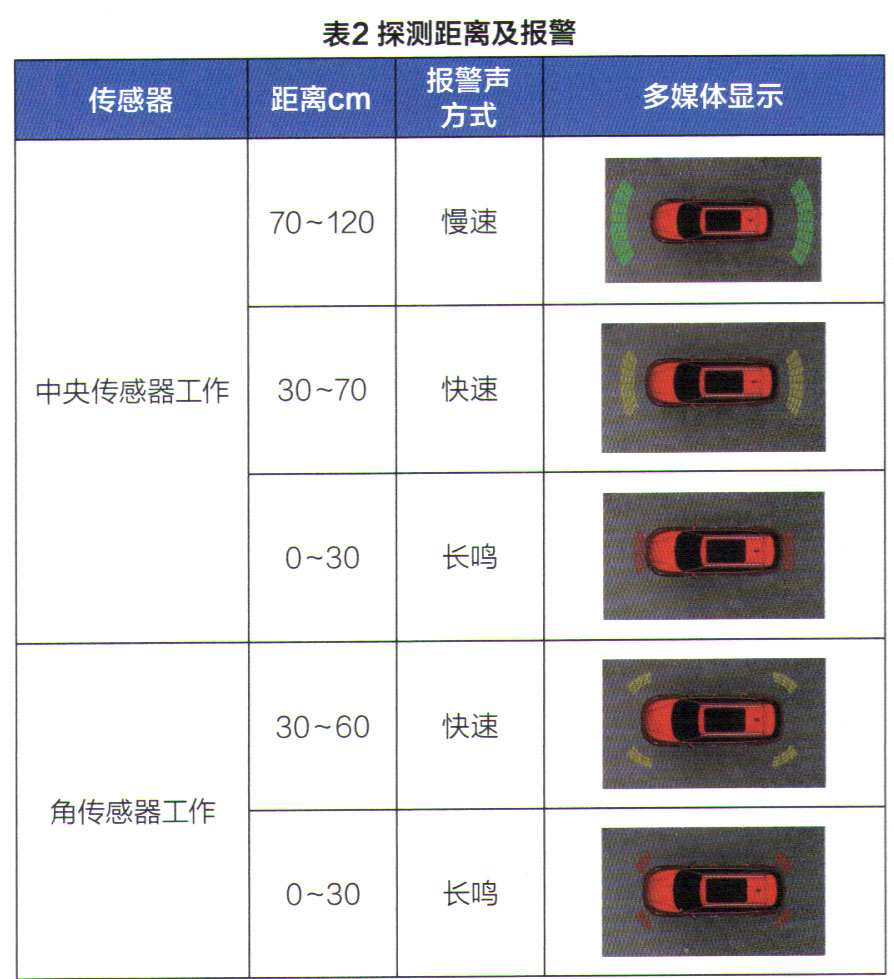
②传感器探测到障碍物时,多媒体显示屏上将显示障碍物的方位及车辆与障碍物间的大致距离,且扬声器鸣响(表2)。
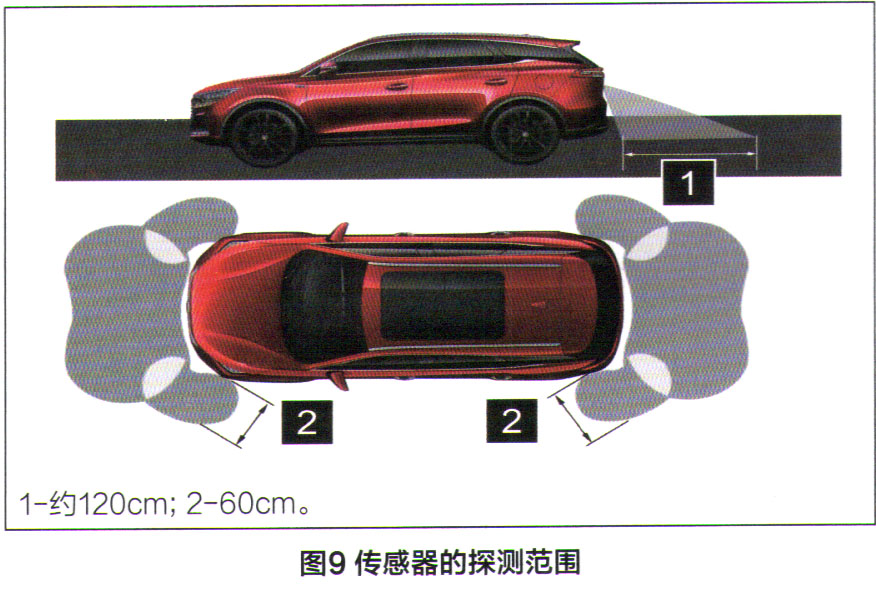
③车辆倒退时,所有传感器工作。
图9中显示了传感器的探测范围。探测范围有限,倒车前要检查车辆周围的情况后缓慢倒车。
10.倒车雷达故障诊断与检测
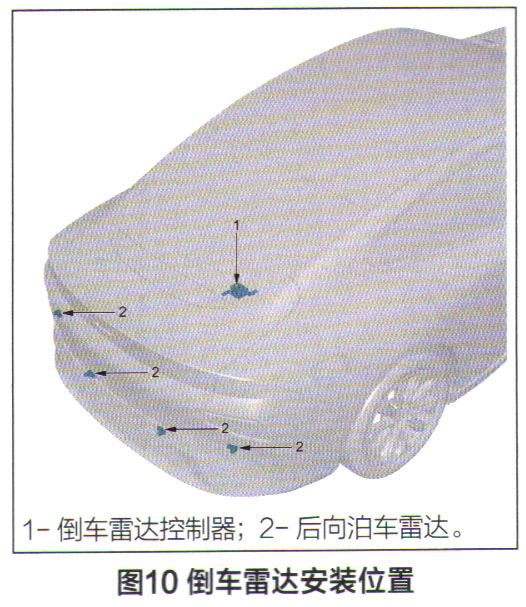
以智能网联汽车小鹏P7为例,该倒车雷达系统主要由倒车雷达控制器与4个安装在后保险杠的超声波雷达组成(图10),当检测到R挡信号并且满足车速条件时,系统开启。并根据车辆距离障碍物的距离不同对其进行不同紧急程度的报警。
关键词:
")
")
")
")

