・上一文章:新能源汽车空调控制系统研究
・下一文章:大众新桑塔纳无怠速故障检修
取决于速度的参数:
·横向加速度增益
取决于横向加速度的参数
·车轮速度增益
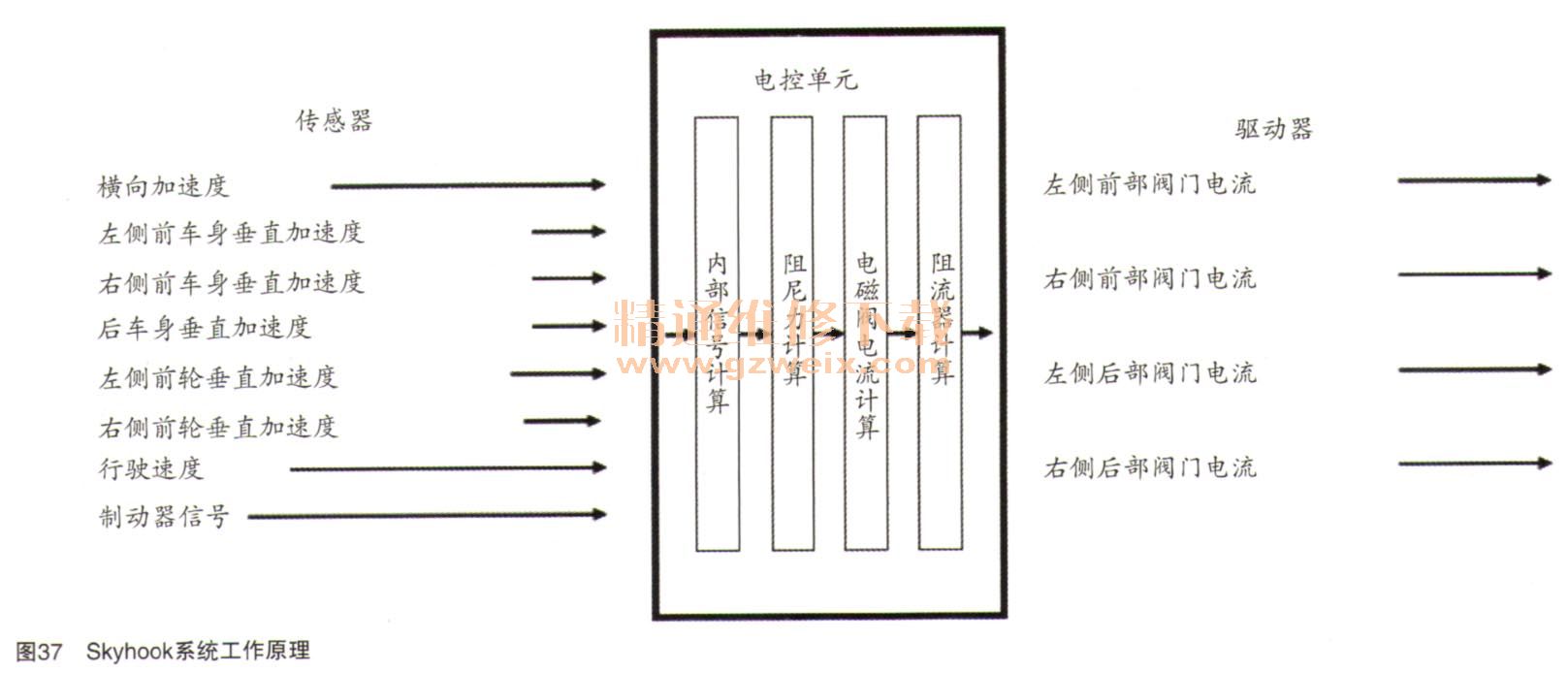
10.电磁阀电流的计算
基于悬架响应曲线,电控单元计算传输至减震器的电流,从而获得所需响应,考虑该应用的典型阻尼曲线和驾驶模式设置。
11.整定参数第4组
减震器限制器的调节常数。
取决于速度的参数:
·最小电流
取决于车身运动的参数:
·正垂直加速度的系统反应增益
·负垂直加速度的系统反应增益
·侧倾加速度的系统反应增益
·俯仰加速度的系统反应增益
取决于横向加速度偏差的参数:
·横向加速度偏差的系统反应增益
取决于最小电流的参数:
·前轴和后轴电流的关系
12.整定参数第5组
弹簧限制器的调节常数。
取决于横向加速度的参数:
·横向加速度的系统反应增益
取决于路面的参数:
·最大电流
其他参数:
·路面效果值的过滤器
·路面效果的退化时间
·路面效果的最大值
·制动反应的最小纵向加速度
·制动反应的最大电流
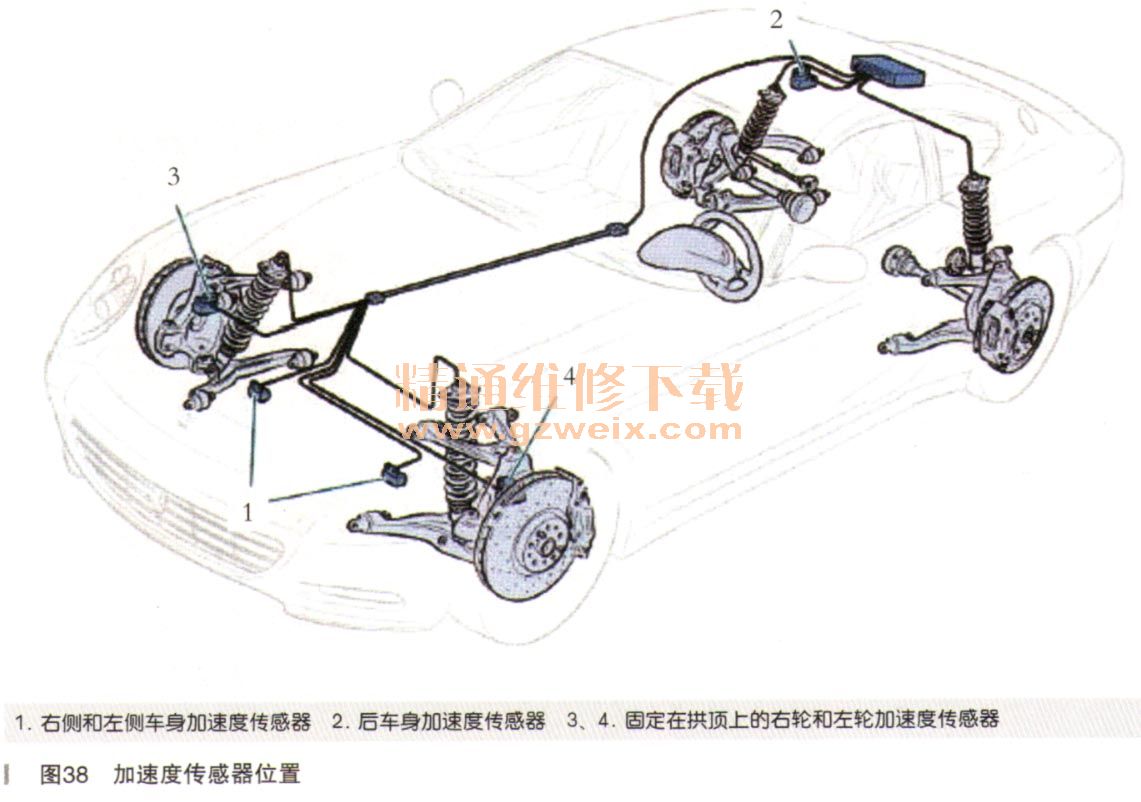
13.加速度传感器
加速度传感器如图38所示。
")
")
")
")

