・上一文章:大众产斯柯达明锐发动机抖动严重
・下一文章:概念阶段和系统级设计阶段汽车电子转向锁功能安全开发设计
自动驾驶汽车的主要特点是智能互联。智能是指在汽车上安装传感器和GPS卫星定位及高精度地图等设备,运用智能算法和软件控制汽车行驶,从而部分或全部解放驾驶员的双手、双脚和眼睛,进一步提高和保证驾驶安全。互联是指汽车安装了通信设备,可以与外界联络,实时了解周边的交通情况,选择最优的路线、安全环保地到达目的地。智能互联汽车的最高阶段就是实现无人驾驶,自动规划行程,自动补充燃料(加油或充电),自动寻找停车位。从而保持交通畅通,乘客可以轻松愉悦地到达目的地。
1 实现自动驾驶的两种技术路线
自动驾驶主要分两种技术路线。一种是基于传感器探测与控制的驾驶辅助ADAS(Advanced DriverAssistance Systems)技术,这种技术就像是给汽车安装了眼睛,让汽车可以看到道路交通标志和周边的车辆行人,在遵守交通规则的基础上,避让周边的障碍物,实现自动驾驶。另外一种是指基于车车通信V2V(Vehicle -to -vehicle)、车路通信V2I(Vehicle-to-Infrastructure) 、V2X车联通信和智能交通技术,它是给汽车安装通信设备,让汽车与周边的交通标志、收费站、汽车、摩托车、自行车和行人通信,实现在遵守交通规则和避让行人基础上的安全驾驶。这有些像盲人走路,虽然看不到周边的情况,但是通过不断地询问周边的车辆和交通设施,了解四周的情况和行驶的方向,从而实现自动驾驶过程。
2 用ADAS技术路线实现自动驾驶
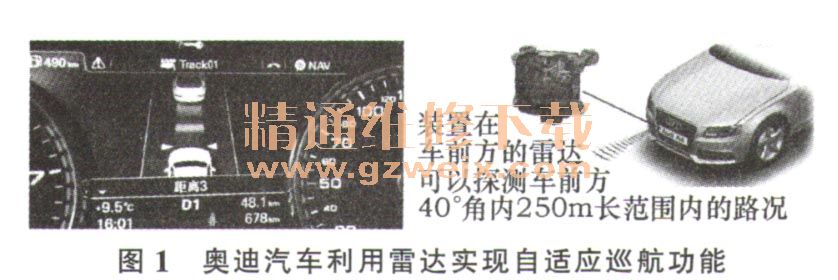
在ADAS技术路线中,根据选择雷达和摄像头2种不同种类的传感器,也有2种技术方案。对于自适应巡航ACC(Adaptive Cruise Control)技术,传统的技术路线是将雷达传感器安装在汽车前部,例如大众汽车是装在车标Logo里面,探测与前车的距离。发动机管理系统EMS控制汽车车速与前车速度一致,始终保持与前车有一定的安全距离。当启动ACC模式后,驾驶员可以不用踩加速踏板和制动踏板,汽车自动跟随前车行驶。奥迪汽车利用雷达实现自适应巡航功能见图1。
随着摄像头分辨率的提高和处理器MCU(MicroControl Unit)计算能力的增强,汽车市场开始出现了用图像识别的软件算法—计算汽车与前车距离的技术,在汽车车内后视镜的位置安装一个前向摄像头,透过前挡风玻璃,拍摄前方的景物视频,利用图像识别算法识别前方的车辆,从而控制汽车行驶速度,实现ACC功能。由于摄像头的硬件成本比雷达便宜,而且这个摄像头还可以用于实现识别车道、行人和交通标志等其它ADAS功能,因此摄像头的应用范围和功能比雷达多,用摄像头取代雷达是未来ADAS技术的发展趋势。目前主要受MCU计算能力有限和软件开发成本高的限制,基于摄像头的ADAS系统还没有大规模在汽车上运用。
主动紧急制动系统AEB(Automatic EmergencyBrake)也是常用的ADAS技术之一,当汽车与前车的距离小于一定的限值,制动系统自动启动,快速将汽车减速到停止状态。传统AEB系统是借助安装在车辆前部的雷达传感器实现的,雷达传感器通过测量反射波与发射波的时间差,计算出汽车与前车的距离,当这个距离小于设置值时,控制制动系统使汽车减速;博世公司开发出立体摄像头图像识别系统,通过左右2个摄像头对拍摄到的视频数据进行图像识别处理,便可计算出前方障碍物与汽车的距离,实现紧急制动。目前路虎与博世进行合作,在路虎全新发现运动版SUV上标配了博世立体摄像头和紧急制动系统(图2)。日本供应商富士重工也在研发基于图像识别技术的自动制动器EyeSight系统,其摄像头由日立公司供应。

3 用V2I技术路线实现自动驾驶
V2I技术与ADAS技术路线有何差异?下面用一个交通标志识别系统(Traffic Sign Recognition,简称TSR)的例子说明。ADAS技术通常用基于摄像头的图像识别方法,首先用摄像头拍摄前方的照片,通过图形识别软件算法的计算,判断前方的交通灯是红灯还是绿灯,也可以识别道路旁边的速度标志的最高限速的数值是多少,然后控制汽车在十字路口是否通过红绿灯,按照什么样的速度行驶。V2I的方法是通过车辆与交通设施通信来判断前方是红灯还是绿灯,十字路口的交通灯按照一定的周期循环向四周发射交通灯是红灯或绿灯的无线电信号,汽车在100 m以外就可以收到信号,解析出交通灯改变红绿灯的时间周期,从而控制汽车以合适的速度通过十字路口,避免紧急制动的发生,大大地提高了行车安全,也降低了汽车的能耗和排放。
4 国内外无人驾驶试运行项目
4.1美国无人驾驶项目
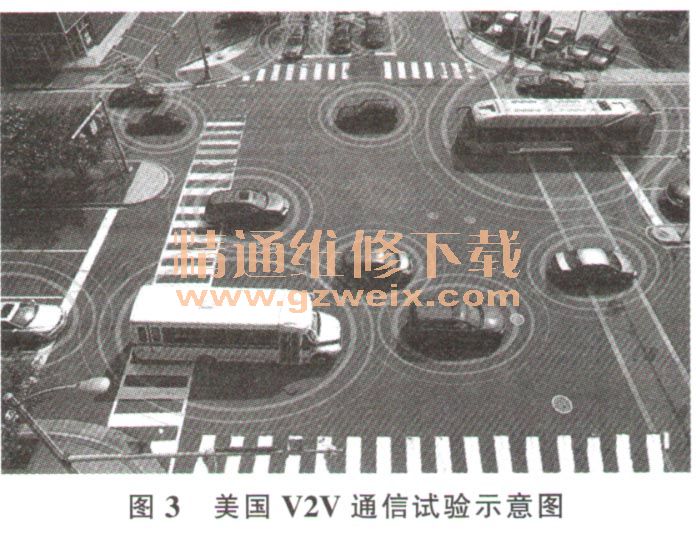
美国高速公路安全管理局(National HighwayTraffic Safety Administration,简称NHTSA)于2012年启动了V2V项目,开始制定车车和车路之间的通信协议。目前福特、通用、本田、现代、戴姆勒、日产、丰田和大众八大汽车制造商,通过碰撞标准合作伙伴(CRASH AVOIDANCE METRICSPARTNERSHIP,简称CAMP)的组织与政府合作开发V2V技术。CAMP组织的每个成员在密歇根州安阿伯都提供车辆参与从2012年年中到2013年年底的试点项目。约3000位驾驶员在普通城市道路上驾驶V2V功能汽车,测试了这个通信系统的功能和缺陷。供应商包括美国思科公司和日本电装公司提供了V2V通信设备与软件。NHTSA计划于2017年提交V2V通信协议标准。这些标准将列于美国联邦机动车安全标准第150条,将成为V2V发射器和信息制定最低要求。另外车车发射器和软件的成本预测是,到2020年估计每辆汽车要花费341-350美元。当前的V2V系统可以每秒钟交换10次位置信息,如行驶方向和速度。如果两辆车位于同一车道,驾驶员会收到警告信息。NHTSA称,新规则将要求新车安装基本的V2V设备,但不会对具体的安全功能提出强制性要求。激活什么样的功能由汽车制造商决定,这依赖于他们的工程制造能力和对新技术的适应能力。V2V可以实现“左转辅助(Left -TurnAssist)”和“交叉口移动辅助(Intersection MovementAssist)”技术,能够有效防止因为车与车之间信息沟通不畅在十字路口发生的车祸。这两项技术预计每年就能挽救491083条美国人的生命,预防2.5万~59.2万起撞车事故。美国V2V通信试验示意图见图3。
")
")
")
")

