・上一文章:五洲龙混合动力客车动力电池辅助充电系统维修
・下一文章:丰田凯美瑞因ECR阀故障导致怠速不稳
摘要:本文介绍基于SAE J1939的增程式客车的CAN总线网络系统设计及诊断设计,并探讨利用总线开发工具CANoe进行网络开发及整车调试的过程。
目前,CAN总线已广泛应用于汽车中,发挥着越来越重要的作用。1991年,CAN总线技术最先在Benz高级客车上获得应用。1994年美国汽车工程师协会以CAN为基础制定了SAE J1939标准,用于货车及客车的控制和通信网络。
SAE J1939(以下简称J1939)是美国汽车工程师协会(SAE)的推荐标准,用于为中重型道路车辆上电子部件间的通信提供标准的体系结构。它由“卡车与大型客车电气与电子委员会”下属的“卡车与大型客车控制和通讯网络附属委员会”开发编写。目前,J1939是在商用车辆、舰船、轨道机车、农业机械和大型发动机中应用最广泛的应用层协议。
1 项目介绍
该增程式客车采用轮边电机驱动,且整个客车涉及较多网络节点,包括轮边双电机、辅助动力单元等13个网络节点,因此站在整车全局的角度上,合理优化设计整车的CAN网络通信是一个关键环节,是保障整车的通信品质及优化控制的重要前提。本文将介绍基于J1939的增程式客车的CAN总线通信网络设计及整车调试过程。
2 CAN网络系统设计
2.1节点源地址分配
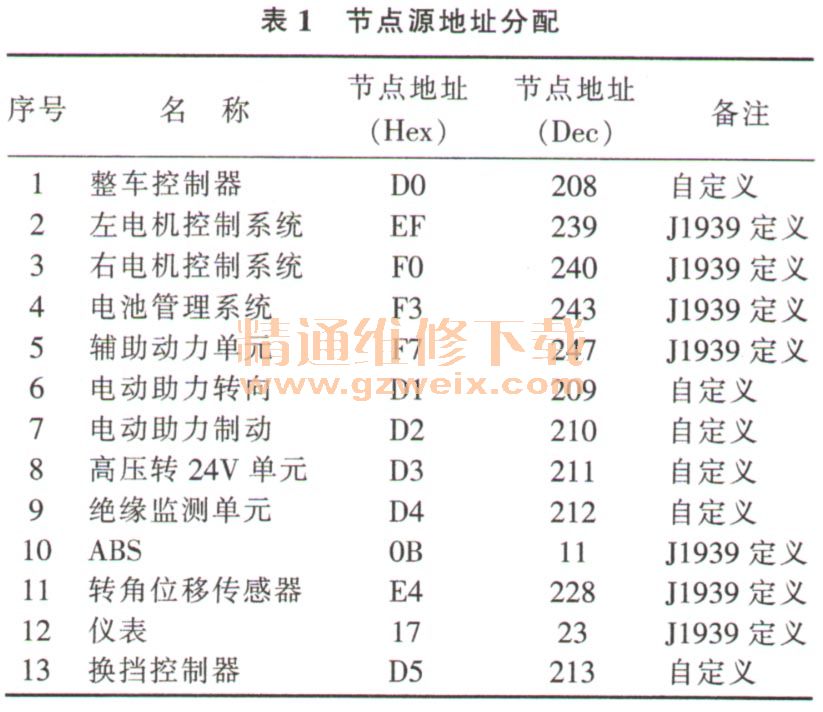
J1939对CAN2.0B进行了重新定义。在重新定义中,29位标示符中源地址域8位,是确保CAN标示符符合CAN协议中的惟一性要求。源地址可以通过依次排列编号来实现,与消息的优先级、更新速度或者重要性无关。J1939中已经规定了一些部件的源地址,除已规定的源地址外,J1939为用户预留的源地址区间为208227,这部分预留区可被主机厂用来进行自定义。本文中的增程式客车中节点源地址有J1939已经规定的,还有的需要进行自定义。对于源地址需要自定义的节点,一律按照顺序依次排列编号确定源地址。源地址分配见表1。
2.2 CAN总线通信设计
2.2.1拓扑结构
该增程式客车CAN网络节点较多,包括轮边双电机驱动在内共13个节点。考虑到各个网络节点通信速率的要求及整个CAN网络的网络负载率,整车共分为3条CAN动力总线,波特率250 kb/s,整车系统网络拓扑结构如图1所示。

由图1可看出,本文中的增程式客车的CAN总线网络系统总共由3条CAN子网构成,即CANA子网、CANB子网、CANC子网,其中整车控制器是作为3个CAN子网之间总线的网关,各子网之间的通信可通过网关转发来完成。
CANA子网主要就是左右轮边电机两个节点,由于驱动电机的实时性要求较高,通信周期设定为10 ms,考虑到驱动电机系统的重要性及网络负载率的问题,将二者处于一个子网中。
CANB子网有ABS及转角位移传感器2个节点,这2个节点的网络报文在J1939中已经规定,是牵涉到安全的重要节点,因此单独构成子网,刷新频率较高。其中转角位移传感器的作用是用来在整车控制时实现双电机驱动控制的电子差速,保证双电机的控制。
CANC子网共涉及电池管理系统、辅助动力单元等8个节点。其中辅助动力单元中,发动机采用天然气发动机,该节点的作用是在电池荷电状态不足的情况下,辅助动力单元启动给电池充电,从而实现整车的增程。高压转低压电源是将整车的540V高压转为低压24 V,供低压电器附件使用。CAN仪表分为前控模块、顶控模块、后控模块3个部分,负责车身电气部分的控制,诸如前灯、刮水、顶灯、后部灯光等。
需要注意,每条CAN总线两端需配备120 fl的终端电阻,该车中将在CAN总线线束中外置终端电阻,以保证总线正常通信。
2.2.2节点信号分析
节点之间信息交换是通过报文实现,报文是信息的载体。因此,通信网络设计中,信号分析是最重要的环节之一,好的信号分析也是后期整车控制的关键基础。信号分析主要分为两个方面:一是从单个控制器的角度进行分析;二是从整车网络的角度进行分析。从整车网络角度分析信号,要根据具体车型的控制要求来进行。本文中以辅助动力单元(英文缩写APU)为例,分析其相关信号参数,见表2。
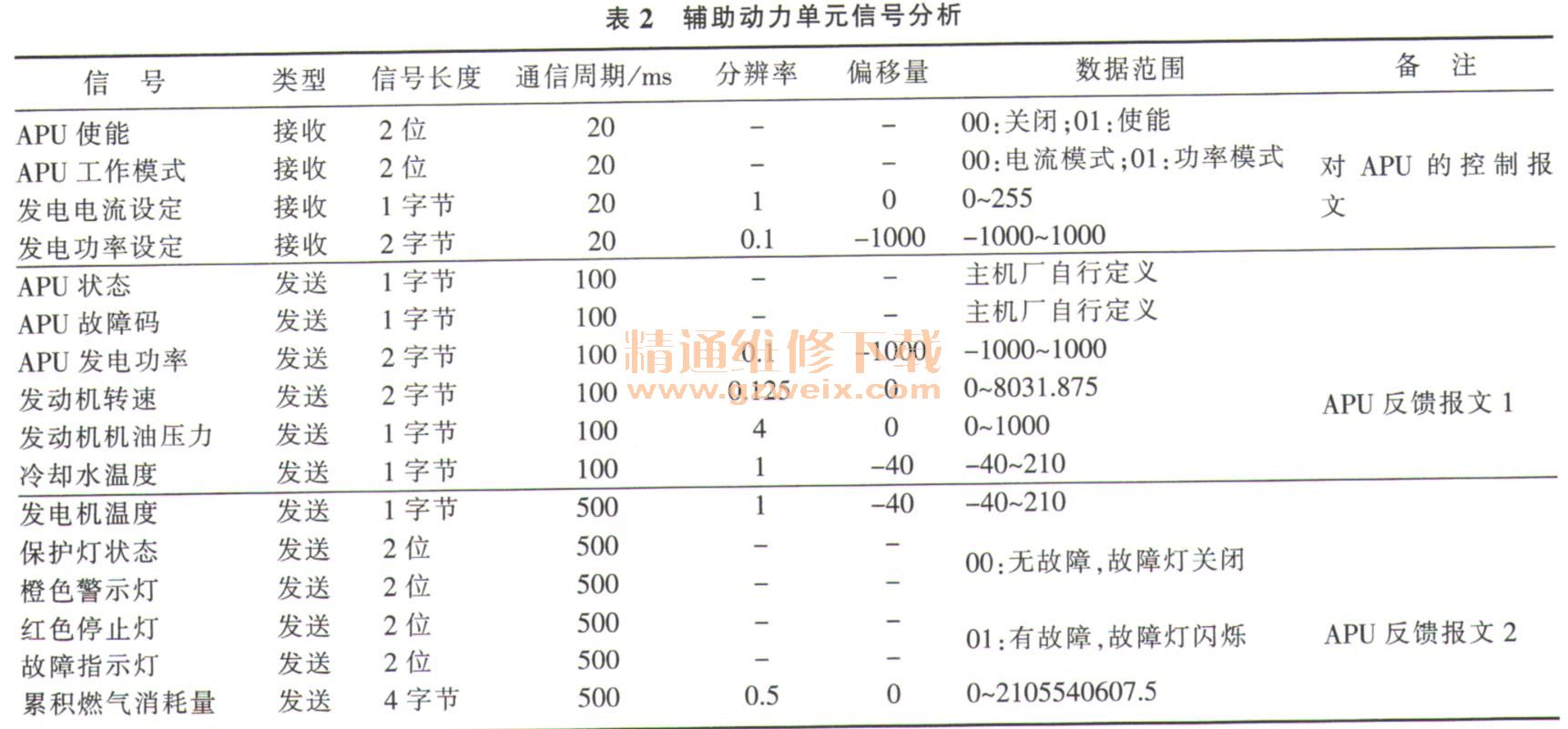
由表2分析可知,有关辅助动力单元的报文总共有3个。用同样的方法分析其他节点,就可以得到整车所需要的所有收发信号,本文不再一一列举。
2.3设计中需注意几个问题
2.3.1轮边双电机驱动轮的方向问题
首先解释什么是轮边电机驱动。轮边双电机驱动是指每个驱动车轮由单独的电动机驱动,但是电动机不是集成在车轮内,而是通过传动装置连接到车轮。图2为轮边驱动电机及其布置位置,轮边驱动电机通过布置在轮边驱动桥上连接到输出轴,从而驱动车轮转动。

由于轮边电机在驱动时左右车轮的转动方向不一致,因此协议制定过程中要特别强调并规定左右轮的正向转动方向。由于该客车采用的驱动桥的方向和车轮的转动方向一致,因此规定:从输出轴方向看,左轮逆时针方向转动为正向转动,右轮顺时针方向转动为正向转动。
2.3.2换挡控制器换档策略
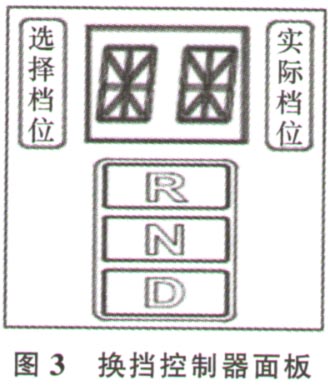
该车的换挡控制不同于传统的换挡手柄,它是由一个按钮式的换挡器通过CAN总线报文来实现换挡功能的。换挡策略的定义需要在整车协议制定过程中与供应商达成共识,否则可能会因为理解上的不同而造成后期换挡控制的差异。该客车总共有3个挡位,N、D、R,并且是3个按钮,如图3所示,驾驶员通过按相应的按钮来进行换挡操作。当驾驶员选择从N到R挡(或从N到D挡时),选择挡位会出现R(或D),为了安全以及借鉴传统车驾驶时的习惯,换挡策略中,规定当从D挡到R挡时或从R挡到D挡时,必须经过N挡,即选择挡位上在R和D之间的跳变中,必须要有N的出现。当误操作从D到R或从R到D,将不执行换挡命令,选择挡位上将出现错误挡位标志E。
")
")
")
")

