・上一文章:剖析一汽奥迪A3 1.4T发动机技术(四)
・下一文章:雪佛兰迈锐宝停放一天后没有转向助力
左侧或右侧护盖的机加工孔中安装有含两个密封件的活塞。该活塞通过AWD阀块接收来自RDU泵的液压压力,并施加压力以将内部和外部离合器盘锁定在一起。活塞与压力盘之间有一个滚针轴承,它一可使活塞在离合器盘及托架旋转时保持静止。
当PTU同步器啮合时,将通过冠状齿轮轴上的花键为外部传动盘托架提供永久性驱动。当向活塞施力压力时,它会将内部和外部传动盘压在一起,锁定内部和外部托架,并允许通过内部传动盘托架将来自冠状齿轮轴的驱动力传递至半轴。
3.全轮驱动(AWD)阀块
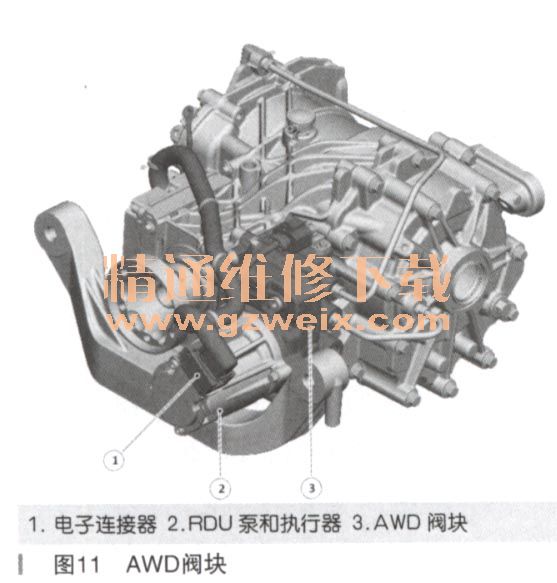
AWD阀块位于RDU的左前侧,靠近传动法兰。阀块密封在RDU壳体上并使用螺钉固定。AWD阀块如图11所示,AWD阀块部件分解图如图12所示。阀块主体和壳体内的铸件空隙形成了液压油储液罐。阀块主体的顶部有一个密封塞,同于加注液压油。阀体的底部有另1个密封塞,用于排放液压油。4个机加工孔上安装有阀芯套筒和滑阀,用于操作压力控制阀(PCV) P1、P2、P3和P4。 PCV控制以下功能:
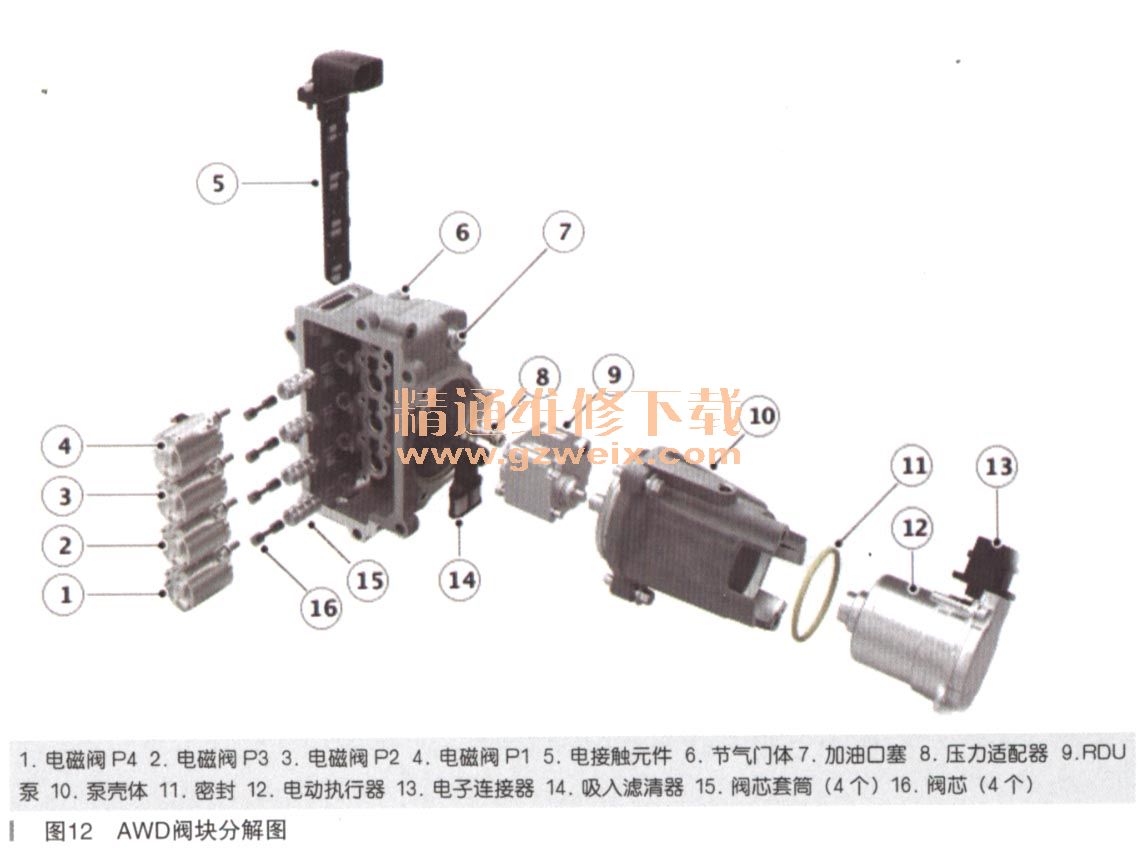
·P1:右侧RDU离合器
·P2:左侧RDU离合器
·P3: PTU同步器活塞一啮合同步器
·P4: PTU同步器一分离同步器
4.RDU泵
RDU泵部件分解图如图13所示,RDU泵位于泵壳体内,并由两颗螺钉固定。该泵为旋转齿轮泵,每转流量为1 mms,并且最大输出压力为4200kPa。泵油液入口配备一个吸入过滤器,它位于阀块内的储液罐底部。压力适配器会将泵出口连接到阀体上的钻孔。传动齿轮输入轴将与电动执行器的输出轴啮合,它可以直接驱动传动齿轮。
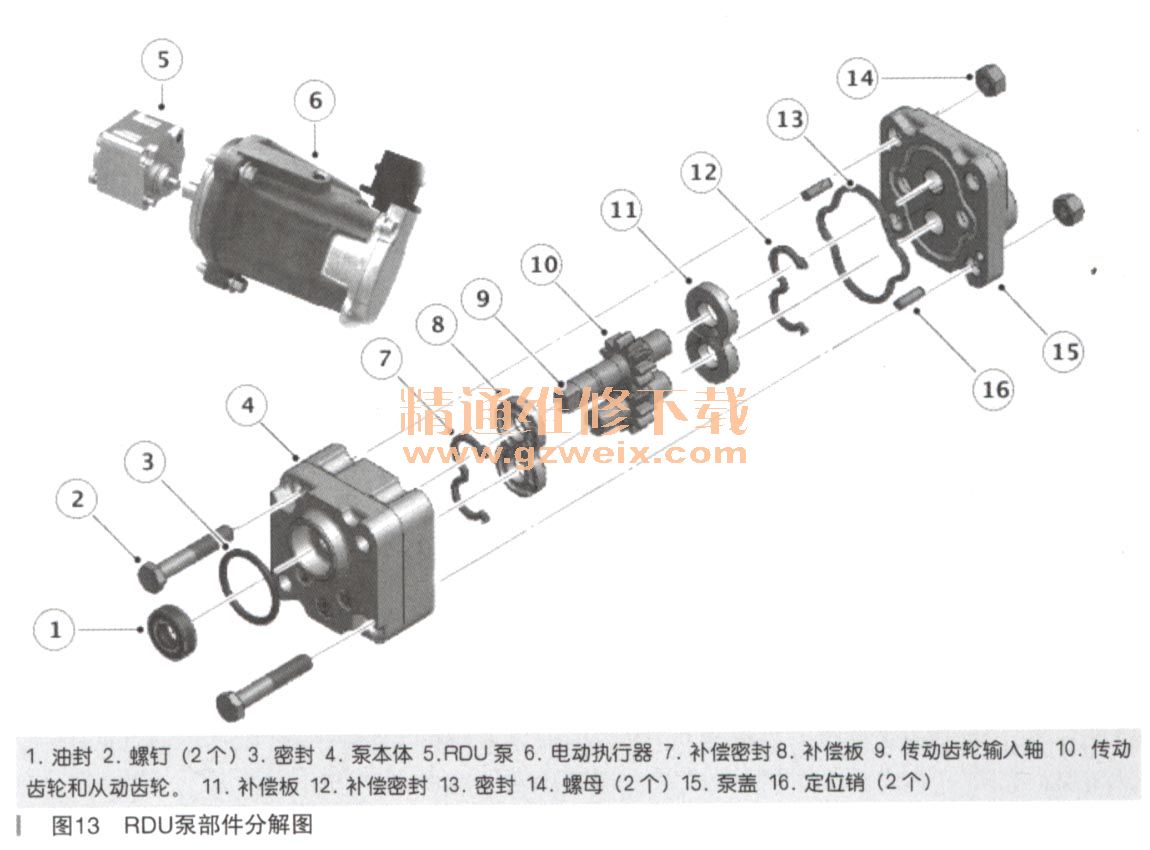
当传动和从动齿轮旋转时,它们将在泵的进气侧分离。这会形成将由液压油填充的空隙和低压。液压油由齿轮带到泵的出口侧,其中的齿轮啮合将排放油液。齿轮的机械间隙和泵本体较小,这样可生成高输出压力。
RDU泵以由三相电机进行驱动,并由全轮驱动控制模块((AWDCM)进行控制。电机的3个绕组由AWDCM进行控制。电动执行器是无刷DC(直流)电机。执行器具有一个固定的定子和一个旋转的永磁转子。执行器的最大旋转速度为5000r/min,最大扭矩输出为0.9N·m。最大电流消耗为30A。AWDCM提供AC(交流)PWM输出,以正确方向和速度操作执行器。输出取决于AWDCM从其他系统模块收到的输入。电机内的3个霍尔传感器向AWDCM提供位置和旋转速度反馈信号。AWDCM可将三相电机驱动至最佳速度和扭矩,以便为AWD阀块提供高达4000kP。的所需最大泵输出压力。通过使用此电机控制和电磁阀PWM调制来控制压力控制阀,AWDCM可以为RDU离合器应用提供所需的液压压力。
5.液压控制回路
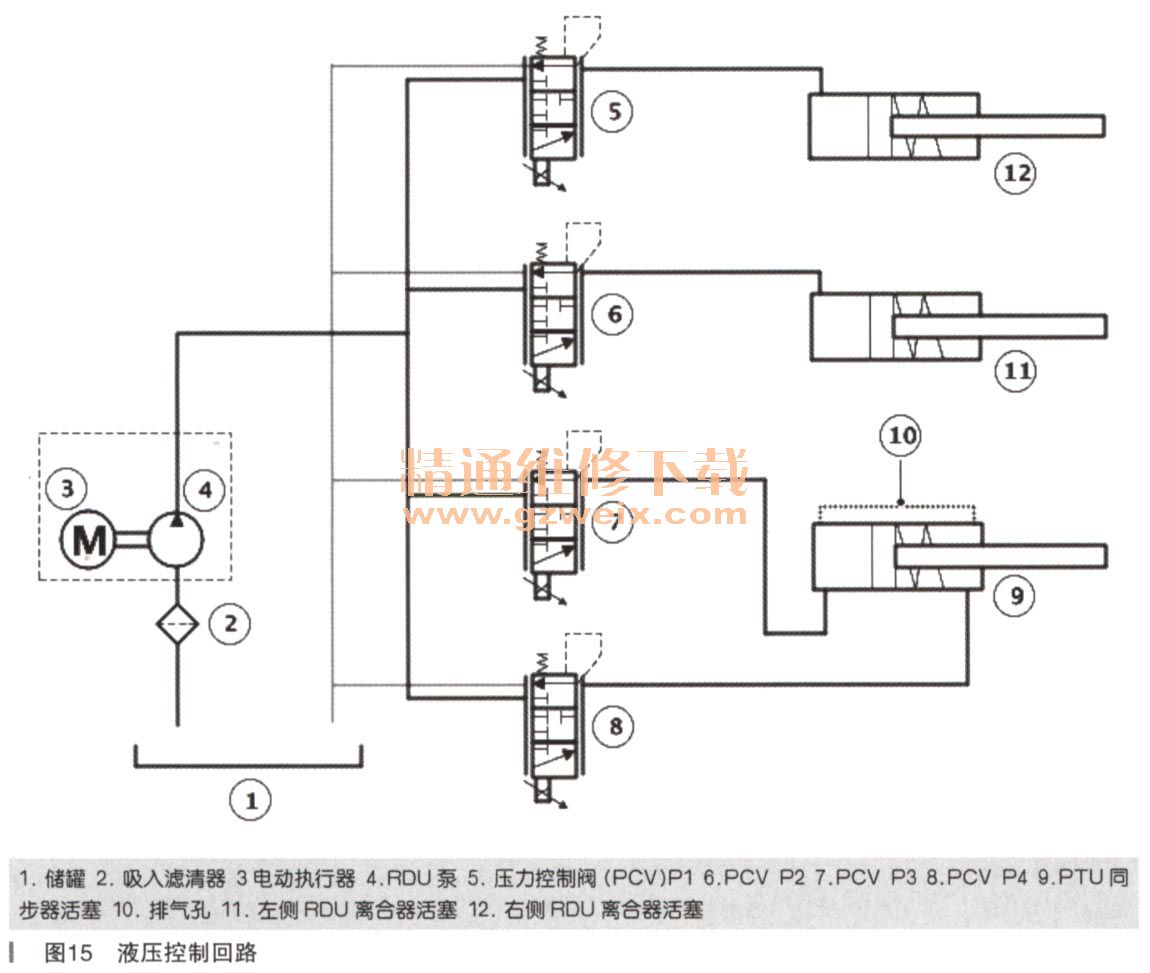
有4个可变力控制电磁阀使用螺钉固定在阀块内。电磁阀由AWDCM以PWM进行控制,以便向RD U离合器和PTU同步器操作提供所需的液压压力。滑阀分解图如图14所示,滑阀包含阀芯套筒和滑阀。滑阀由控制电磁阀操作,它在套筒中移动阀芯。在套筒上移动阀芯打开和关闭端口可向适用的功能提供压力。带电气接头的电接触元件位于阀块顶部。电气接头具有接触元件,它与阀体中的4个电磁阀相连。接触元件由两颗螺钉固定在阀体中,并用一个。形密封圈密封液压控制回路如图15所示,位于AWD阀块中的4个压力控制阀由电磁阀操作,并由AWDCM进行控制。右侧离合器阀被标记为P1,左侧离合器阀为P2,连接PTU的阀为P3,断开PTU的阀为P4。压力控制阀用于以电子方式降低为PTU同步器和RDU离合器提供的压力,以便实现精确控制。当电磁线圈断电时,压力控制阀将由弹簧力关闭,并且不会为同步器或离合器提供任何压力。系统中残留的任何油液压力将回流至AWD阀块储液瓶。将电流应用到电磁阀线圈时,压力控制阀轴将开始移动,以将泵的压力入口连接至同步器或离合器。施加的压力由泵输出和应用到电磁线圈的电流进行控制。随着线圈电流信号增大或减小,为同步器或离合器施加的压力将随着信号变化。当线圈电流达到最大值时,将施加全部压力。AWDCM可单独控制每个电磁阀,并且可同时对同步器和RDU离合器的操作提供无限控制。

6.全轮驱动控制模块(AWDCM)
如图16所示,AWDCM位于RDU的右前侧,靠近传动法兰。AWDCM与RDU壳体相连并使用螺钉固定。两个电气接头在AWD阀块和车辆系统之间提供接口。上部接头提供与RDU泵执行器和控制电磁阀的连接。下部接头提供与其他车辆系统模块的接口。AWDCM从底盘和动力总成系统总线接收高速多重CAN总线信号。

AWDCM可监控传输至RDU泵执行器和控制电磁阀的电子信号。AWDCM软件可检查是否存在短路和断路,监控电流消耗,并且可以对错误信号执行合理性检查。它还可以根据预期系统响应监控液压压力以检测泄漏、堵塞和故障。
可通过RDU泵执行器旋转速度流消耗来检测液压压力。如果电机转速高于预期,则将检测到低油液压力。如果电机转速过低并且电流消耗过高,则将检测到高油液压力或堵塞。如果液压系统的加压速度高于或低于预期(通过监控油液压力进行检侧),则将检测到控制电磁阀存在故障。此外还会监控滑阀。如果滑阀无法打开,则通过监控RDU泵执行器可检测到低油液压力。
系统通过来自底盘和动力总成系统总线的高速CAN信号接收来自其他车辆系统的输入。此信息用于确定连接和断开连接状态以及连接速度。这是为了确保显示正确的连接状态,以便提供最大操控和动态改进性能以及最佳的燃油经济性。
7.控制说明
主动传动系统由AWDCM进行控制。通过使用来自其他车辆的输入,AWDCM可以自动断开和连接,并提供AWD以提高车辆牵引和动态性能。在正常行驶条件下,AWDCM将断开主动传动系统,并提供FWD(front wheel drive)以提高经济性和减少排放。AWDCM控制框图如图17所示,AWDCM与以下车辆系统控制模块和多条CAN,总线相连:

(1)防抱死制动系统(ABS)控制模块(高速CAN动力总成系统总线):车轮转速、ABS状态、动态稳定控制系统(DSC)状态、陡坡缓降控制(HDC)状态和车速输入。
(2)约束控制模块(RCM)(高速CAN底盘系统总线):横向加速输入。
( 3)转向角传感器模块( SASM)(高速CAN动力总成系统总线):转向角输入。
(4)电动驻车制动控制模块(EPBCM)(高速CAN动力总成系统总线):电动驻车制动器应用或释放输入。
(5)中央接线盒(CJB)(高速CAN动力总成系统总线):触摸屏(TS)图像和仪表盘(IC)显示输
出。
( 6)全地形反馈适应系统(TR)开关组(高速CAN动力总成系统总线):所选TR模式选择输入。
(7)发动机控制模块(ECM)(高速CAN动力总成系统总线):发动机扭矩、加速器踏板位置、环境温度、RDU离合器温度计算。
(8)变速器控制开关(TCS)(高速CAN动力总成系统总线):挡位
(9)变速器控制模块(TCM)(高速CAN动力总成系统总线):变速器状态(仅适用于自动变速器)。
AWDCM通过硬接线与RDU泵和AWD阀块相连。AWDCM为电机提供PWM输出并接收来自电机位置传感器的三个输入。来自AWDCM的低侧控制驱动输出用于控制压力控制阀,以便控制和操作每个压力控制阀。AWDCM将自动连接PTU同步器并在低于20km/h的速度下操作RDU离合器,以便在车辆从静止状态沿直线启动出发时提高牵引力。当车速超过35km/h时,系统将断开传动系统以提高效率。当选择倒车挡时,将始终提供AWD。
AWDCM将评估接收到的输入,并且可以预测何时需要AWD。所接收的典型输入来自加速器踏板位置( APP)传感器,并接收来自TCM的发动机扭矩请求、来自转向角传感器模块((SASM)的转向角和来自RCM的横向加速度。可从ABS控制模块的输入中检测到失去牵引力。车辆空转时,将检测到ABS和动态稳定控制系统(DSC活动和偏航信号。对这些输入执行的评估将使AWDCM连接主动传动系统。AWDCM将自动连接PTU同步器并操作RDU离合器,以在车辆从静止状态沿直线启动出发、以低于35km/h的速度向前行驶以及处于倒车挡时提高牵引力。当驾驶员选择Terrain Response Auto2)(全地形反馈适应系统2)模式(需要AWD)时,AWDCM还会以AWD操作主动传动系统。当请求陡坡缓降控制(HDC时,也会激活AWD。当环境温度低于-10℃时,AWDCM将保持主动传动系统连接。当车辆静止且发动机停止时,主动传动系统将保持连接状态。
主动扭矩偏置可单独对每个传动轴完全或部分应用RDU离合器,以提供主动扭矩偏置。AWDCM可根据加速度、偏航和转向过度或转向不足的输入来确定每个半轴所需的离合器扭矩。这使RDU被锁定,从而以与防滑差速器相似的方式执不丁。
")
")
")
")

