����һ���£�PLCʵ�����������������DZ�ϵͳ���
����һ���£�PLCʵ�ֶ�̨������Զ�̲���ͨѶ
ժҪ�����������һ�ֻ���PLC���첽�綯�������붨λ�ۺϿ���ϵͳ,Ӧ��ģ��-PI���Ͽ����㷨ʵ�����첽�綯�����ٶȿ���,Ӧ�ñ��������Ե���ģ�������㷨ʵ�����첽�綯����λ�ÿ��ơ���ϵͳ���첽�綯���ٶȿ��ƺ�λ�ÿ���Ϊһ��,�ﵽ��һ���Ŀ��ƾ��ȡ�
����1 ����
�����ڼӹ��豸�ͻ����������ŷ�ϵͳ�У�����Ӧ�汸�ٶȺ�λ�ÿ��ƵĹ���;��סլС ���߲㽨���ĺ�ѹ��ˮϵͳ�У�Ҫ�����нϸߵĵ�������;������ת¯��ȷ��λ���Ѷ��е��λ�� ����ϵͳ�У�Ҫ�����о�ȷ�Ķ�λ���ܡ�������Ӧ�ó����У��첽�綯��������ʡ����Լ۱ȵĶ��� ���ƶ�ռ��һϯ֮�أ���ͬʱ��������ܺͶ�λ����ȴ�����������������ơ�
����2 Ӳ�����
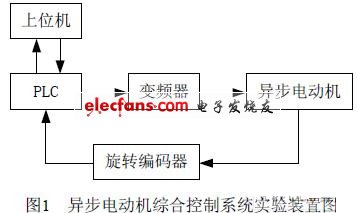
�����첽�綯���ۺϿ���ϵͳӲ����ͼ1��ʾ��ͼ1�У���λ�������PLCͨ����Ƶ�����첽�綯�������� �Ⱥ�λ�ÿ��ơ�ͨ����ת���������������ֵ���Ի���첽�綯�����ٶȺ�λ����Ϣ�����������PLC�� �ɣ�����������λ��ͨѶ��������ֵ������λ������λ������PLC���������������ֵ�õ��ٶȺ�λ ����Ϣ�����ݲ�ͬ�Ŀ��Ʋ��ԣ��õ����������——�ٶȸ���ֵ���ٴ���PLC������PLC��A/Dת��ģ�飬 ���ٶȸ���ֵ��ģ�����͵���Ƶ����ģ����ƶ˽��п��ƣ��γɱջ����ơ�
������ϵͳʵ���У��첽�綯������YZA5*S ����180W �첽�綯�������ѹ380 �����Ƶ��50Hz�� �ת��1400r/min�������0.66A;��ת���������õ���E6B2-CWZ6C ��������ת���������ֱ���Ϊ 1000P/R(�������¼�����ʽ�ɴ�4000P/R)�����ѹ5VDC-5%~24VDC+5%�����缫��·���;��Ƶ��Ϊ�����ӹ�˾��MICRO MASTER440;PLC ����OMRON CQM1H��
�����ڿ������ƹ����£�MICRO MASTER440 ��Ƶ������ͨ��BOP ���������������˿ڽ���������ͣ ֹ������ת��ָ����Ƶ�����з�ʽ����ͨ��BOP �塢ģ��������˿ں�����������˿����ַ�ʽ���� �ٶȵ���ָ���ϵͳʵ�ֵ��DZջ����ƣ������PLC �Ŀ���������˿�����Ƶ��������������˿ڷ��� ������з�ʽ�Ŀ���ָ�ͬʱ��PLC A/D ת��ģ�������˿�����Ƶ����ģ��������˿ڷ����ٶȵ��� ָ�
����CQM1H PLC �ṩ��һ��RS232C ͨѶ�ڣ��õ��½�������λ������������������ɹ���һ���� ������硣��λ�����ʵ�ּ�ع��ܣ������˻������������ʾ������ָ��Ͳ��������롢���ӿ����㷨 ��ʵ�֡�ʵ�������ߵ���ʾ�����ݵĴ洢����ӡ�ȹ��ܡ���λ����PLC ֮���ͨѶ����CQM1H ��Ҫ ��Ĺ̶���ʽ��ͨѶЭ�顣
����3 ����ʵ��
����3.1 ͨѶ���ع��ܵ�ʵ��
����Ϊʵ�� PLC ����λ��֮���ͨѶ���ܣ�����ֱ��PLC ����λ�������趨����CQM1H �У���Ҫ�� ϵͳ�洢��������ֽڽ����趨��ȷ������ͨѶ�IJ����ʡ���ʼλ������λ��ֹͣλ��ͨѶ֡��ʽ���罫 DM*6 �趨Ϊ��������9600K��żУ�顢��ʼλ1 λ��λ��7 λ��ֹͣλ2 λ�ȡ� ����λ������У����ø����Ա�д�������ʵ��ͨѶ�ͼ�ع��ܡ�������� Visual Basic ���ԣ��� �����������֣��Ⱦ���Windows �����е��������ܺ�ͼ�ι����������־��б�̵ļ����ԡ���Visual Basic ����һ��ר�ŵĴ���ͨѶ�ؼ�——MSComm ͨѶ�ؼ���ͨ���ÿؼ������趨ͨѶ֡��ʽ��ʵ��ͨѶ���ܡ� �����趨�������£�
����MSComm1.CommPort = 1
����MSComm1.Settings = "9600,e,7,2" ;�趨ͨѶ֡��ʽ
����MSComm1.PortOpen = True ;��ͨѶ�˿�
����MSComm1.InBufferCount = 0 ;������ջ�����
����MSComm1.OutBufferCount = 0 ;������ͻ�����
����MSComm1.InputMode=ComInputMode Text ;�������ı���ʽȡ��
������λ����CQM1H �ļ�ط�ʽ�����֡�һ��������λ����PLC ������ʼ���Ҫ��PLC ��������� �����ݣ��������ݸ����ݽ��н����ʾ�Ϳ������㣬����PLC ��������ָ�ֱ�Ӹı�PLC ���������� ģ���������ʵ���ٶȺ�λ�ÿ���;��һ������PLC ��������λ�����ͳ�ʼ����ṩ����������ݣ��� λ���������ݲ����ݸ����ݽ��н����ʾ�Ϳ�������ȡ��������ǰ�ߡ�
����Ϊ�� CQM1H ��ͨѶ���ݸ�ʽƥ�䣬��λ����������ĸ�ʽ���£�

�����������������@��ͷ���ڵ��ָ������λ��ͨѶ��PLC��ͷ����Ϊ���ַ�������룬���������������ݣ�FCS Ϊ��������У���ֹ���̶��趨Ϊ*��L��
����PLC ����Ӧ��ʽ���£�

����β���뷵�����״̬(�Ƿ��д�����)������ֻ����������ʱ�ŷ��ء������ݳ���131 ���ַ�ʱ�� �ɷ��鴫�͡�PLC ���ص�����ΪASCII ��ʽ�������Զ�������@���ڵ�š�FCS����ֹ���ȣ���Ҫ����λ ���б�д��صĴ���������ͨѶ����������½�ȡ����Ҫ���������ݡ�





