・上一文章:在电路板设计软件中输入汉字的方法
・下一文章:简洁方便的焊盘焊孔除锡方法
BEAM机器入是一种十分有趣、制作又极为简单的机器人。BEAM是英文“Biology EleCTRonICs AesthetiosMechanics”的缩写,中文意思为“生物学、电子、美学、机械”。它是在十几年前由美国洛萨拉莫斯国家实验室的研究人员马克,蒂尔登 (MarkTilden)创立的,BEAM机器入不需要微处理器作“大脑”,也没有极其复杂的控制线路,仅有一些传感器和传动器,却能模仿低级生物,以原始的生存本能为基础来运行。这些看似简单的昆虫、爬虫类机器人,却能进化出一些相当复杂的行为. 现在世界各地有很多BEAM机器人爱好者,他们也会组织一些制作比赛和心得交流会之类的活动,创立者蒂尔登博士这样说:“你几乎不费吹灰之力就能造出一个BEAM机器人,丽不必去写复杂的程序。但更重要的是,它作为一个范例向你展示了生物学的力量。
BEAM机器人的基本概念就是利用电路和机械结构模拟简单生物的基本求生本能,它的电路并不是像传统机器入运行时根据所编制程序去执行,而是使用类神经元电路使得电路无意识地运行,从而进化出复杂的动作。我们知道,生物的神经元在受到外界的影响达一个阈值后便会把信号传输到大脑,同时做出反射动作,如在常规体检中常做的“膝跳反射”,扣击髌韧带,小腿会伸直,这是因为腱反射的特点引起。当以一定的力度叩击肌腱时,肌肉内的肌梭几乎同时受到牵拉,该传入的冲击进入中枢后又几乎同时使该肌的运动神经元发生兴奋,于是该肌的肌纤维发生一次收缩。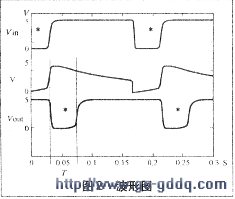
右图就是一个常用的、最简单的类神经元电路。它由RC积分电路和一个反相器组成。我们可以使用示波器测量图 1 中各点的电压波形来分析类神经元电路的工作原理,左图是测量输人、V点、输出三个点的电压得出的波形。当输入电压从低变高时,V点电压也升高,这时反相器输出低电平,因为电容和电阻的作用,V点电压逐渐回落,当V点电压低于反相器最低输入电压阈值时,反相器输出高电平。时间段 T的长短就取决于电阻电容的取值,而这个 T值就可以理解为神经元所产生的兴奋信号。当使用两个或两个以上的神经元电路连接成网络时,信号就可以在这些神经元电路中传递下去。当输入端接入传感器,输出端接入电动机时,神经元网络就可以对环境产生反应,并通过电动机产生相应的动作,这样就为机器人对环境的感知和自身的可动性提供了可能。在同一条神经元网络中,信号输入后会通过每一个神经元,--直传输下去。因为传感器输入信号是模拟量时,信号没有精确的规律性,再加上输入踹的RC作用,使得输出结果更为复杂和多变。这种模糊的逻辑也正是BEAM的乐趣所在,它不像使用微控制器那样产生精确和可预期的控制,而是展现出易变、复杂和有时混乱的行为。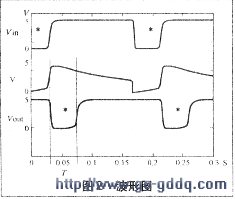
由多个神经元电路组成神经元网络的连接方法有很多种,不一样的连接产生的效果也不一样。下面我们看看一些简单的神经元网络连接方法。
下左图是一个由4个神经元组成的网络,b的输入和e的输出连接在一起,这样电路中前后电路产生的脉冲就一直不断地在这个环路上传递,各个输出点的波形图就如下面右图所示的一样,可以很明显地看出信号在传输时会受到 RC电路的影响。如果没有RC电路,相邻两个输出点的波形一直都会是相反的。
 |
 |
如果在b点和 d点接入一个电动机A,c点和e点接入一个电动机B,在信号传递的一个周期内,A电机先反转,然后B电机反转,A电机正转,B电机正转,这样两个电机就会不断地动作下去,要是把这两个电机作为BEAM机器人的脚,只要它有电,就会一直不俘地移动,直至没电为止。这样的BEAM还没有感知能力,还不能对周围的环境做出反应,如果这个电路“进化”一些,变成图5所示电路,在右图的电输入踹接人一个传感器,只要传感器因环境而触发时,电路就会产生一个脉冲周期来驱动电动机。这样的连接就可以用作BBAM机器人的肢体控制,BEAM机器人的结构就可以做成如图6所示一样,每条神经元网络控制一条脚,信号来时,水平电机先带动垂直电机和脚,然后垂直电机动作控制脚运动,使BEAM机器人向前走。图中所用传感器可以使用常见的光敏电阻、光电池、轻触开关、驻极体话筒、单簧管等。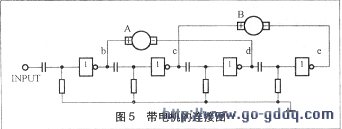
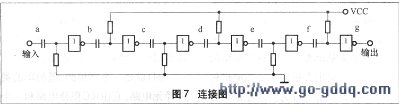
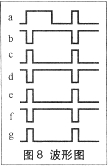
图7的连接方式与图3相差不多,只是把半数的输入踹上拉到VCC 这样就可以得到图8的波形,只要输入踹a有一个从低电平到高电平的跳变,网络上的输出端同时会反应出来,而不像图3电路要延时才会反应。从以上介绍可以看出,只要对这些电路的输入踹进行干预,输出踹所产生的结果就会不一样,这也导致了BEAM机器人行为的易变性。
 |
 |
笔者认为BEAM机器人的制作不但适合培养青少年对电子、机器人的兴趣爱好,也可以作为另一种机器人应用的研究方向,希望能有更多的BEAM爱好者一起学习交流。今后笔者还会为大家介绍简单的BEAM机器人的制作方法。
本文只是简单介绍了BEAM的基本原理和基本组成电路,实际上BEAM 的电路形式是没有拘束的,只要电路能符合BEAM 的原理就可以了。在外观形式上同样也是不拘一格,制作者喜欢做成什么样子都行。本文标题下方所示就是一些国外爱好者的制作。
")
")



