・上一文章:学习GAL应用设计的意义
・下一文章:T03高热散逸散热器
3.信号缓冲
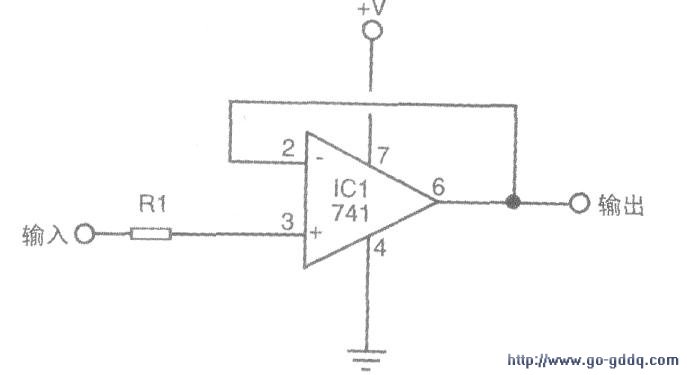
机器人控制电路可能使所用的输入源因负载过重而垮掉。这通常是由于控制电路很低的输入阻抗引起的。当发生这种情况时,输入源的电特性发生改变,可能会产生错误的结果。通过对输入进行缓冲,您就可以控制加载量,减少或消除不希望的副效应。
下图所示的运算放大器是为控制电路输入端提供高阻抗缓冲的一种常用方法。R1确定输入阻抗。请注意,其中没有图16中的R2。在这种情况下,运算放大器被用作单位增益模式.对信号不进行放大。
4.公共输入接口
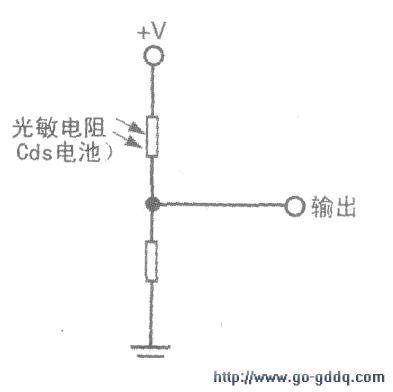
下图是模拟输入的公用接口。它们可用来连接模数转换器( ADC)、比较器和缓冲器等。最常用的接口如下:
■CdS(硫化镉)电池实质上就是可变电阻。把CdS电池与另一个电阻串联在电路的+V与地之间,就可以产生一个可变的电压,直接读入ADC或比较器,通常不需要放大。
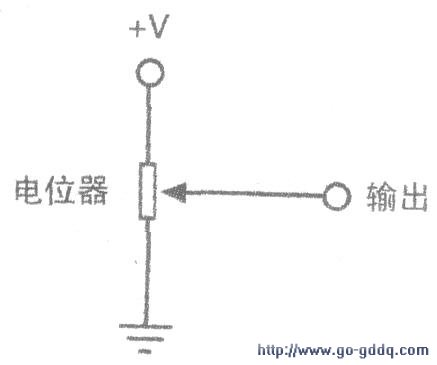
■电位器在如图19那样连接时就构成一个分压器。电压可在地与+V之间变化,不必放大。
■光电晶体管输出变化的电流,可由电阻转变成电压(阻值越大,其灵敏度越高)。光电晶体管的输出端一般接到靠近+V的地,所以不必进一步放大。
■与光电晶体管一样,光电二极管的输出也是变化的电流。这个输出也可以通过电阻转变成电压(参阅图18,阻值越大,其灵敏度越高)。这个输出有一个相当大的弱点:它不是以伏计,而是以毫伏计,所以通常必须放大。
")
")



