・上一文章:详解奔驰车系照明控制系统技术
・下一文章:减小稳压整充器漏电流的方法
两轮摩托车在行驶转弯时,需要在有限的空间里通过,尤其在城乡狭小通道转弯时,要求转弯半径较小,通过性良好。因此,为使两轮摩托车的转弯半径满足使用性能安全、稳定、可靠性要求,必须依据最优化的转弯半径计算数据作为设计理念,对影响转弯半径的两轮摩托车零部件进行分析与设计,使实际测量的数据精确、正确,以降低后期改进相关零部件的模具及焊接工装制作成本费用。
在多年的两轮摩托车开发研究与技术改进过程中,对最小转弯半径的数据支持只依据实际测量数据,测量数据的误差值没有可行的标准比对,根据三维模拟环境,及对摩托车整车转向角及最小转弯半径测量数据反复分析验证,摩托车在转弯过程中前后轮轨迹线理论应为同心圆,通过确定2个圆的圆心,可准确计算出摩托车最小转弯半径。
1 两轮摩托车最小转弯半径的计算方法
两轮摩托车整车前伸角、两轮轴心距离L如图1所示。两轮摩托车整车转弯半径在静态状态下,经过三维模拟、理论计算得到:当摩托车整车前伸角δ=26.5°时,将手把向右转动到最大转向角,前轮接触地面的点的最大转向角实际比手把转向角小3°,摩托车前伸角大小(23°~30°)不同,经过三维与经验计算的前轮转向角(以车架立管轴心线转动时)也会相应减小(2°~3°)。在三维模拟环境中,将前轮向右转向最大角度刀时,以前轮内侧弧长AB作垂直平分线EF,垂直平分线EF与弧长AB的交点D作为弧长AB的切线切点,作出弧长AB的切线DH与AB垂直平分线EF垂直,将EF垂直平分线与后轮中心线OK延长相交于O点,以O点为中心,OD为最小转弯半径(同RQ )作出最小转弯轨迹线如图2所示。

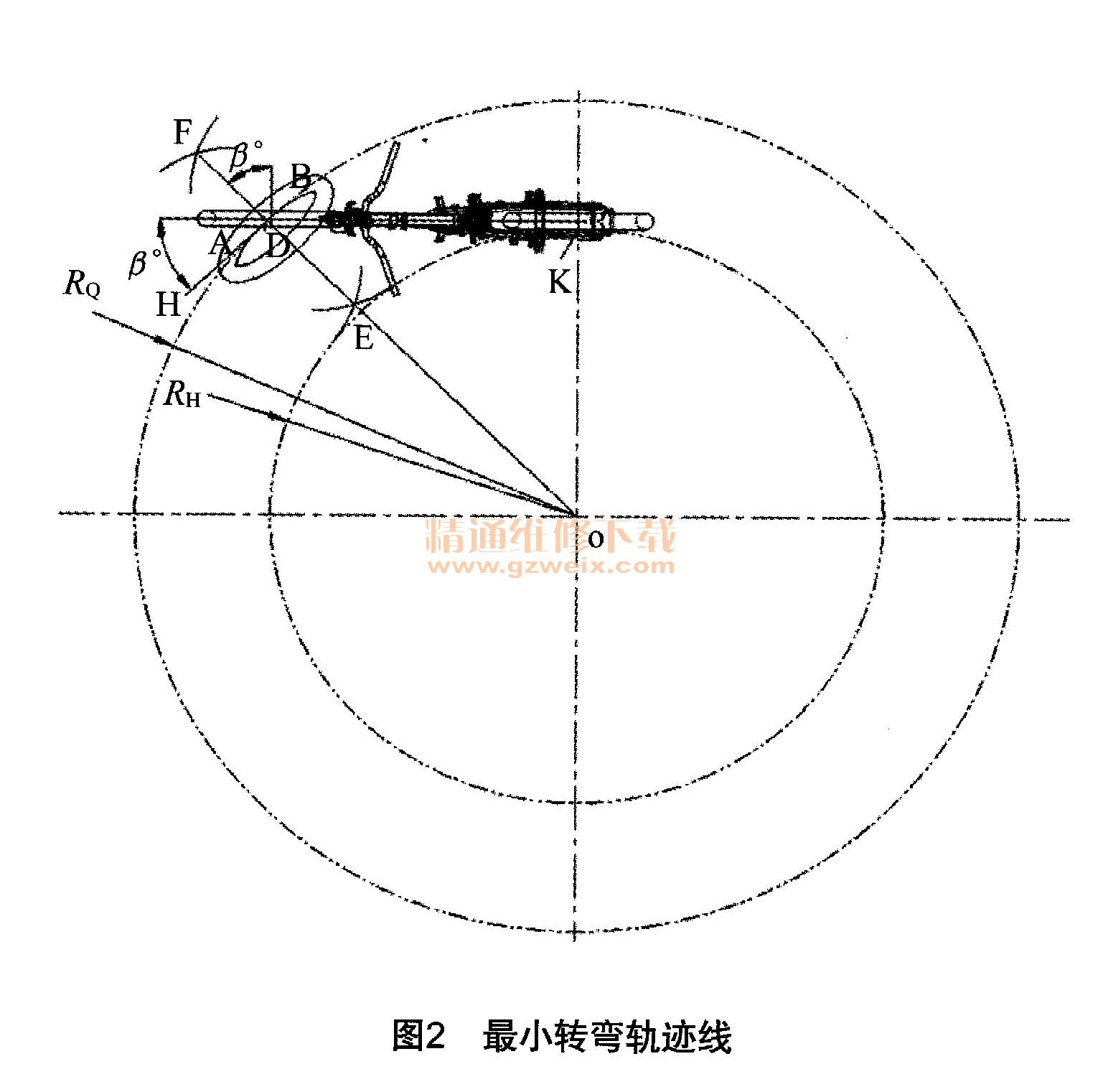
在三维模拟环境中,摩托车视为静止状态,将手把(沿车架立管轴心线)转向最大角度a,前轮沿手把转向轴线向右转动时的最大转向角β=a-(2°~3°)。
2 两轮摩托车转弯时最小通过半径的测试方法
将摩托车转向最大转向角,用印迹法、投影标记法或其他能反映整个圆轨迹线的方法,对整个轨迹圆不同的弧长作3~5个垂直平分线(如OF线),垂直平分线的交点为圆心,Rw为摩托车转向手把外侧最小通过圆半径,Rn是摩托车转向手把内侧最小通过圆半径。最小转弯半径测试方法如图3所示。

3 结论
在实际运用中,通过不断测量与计算分析发现,两轮摩托车最小转弯半径的计算方法与最小通过半径测试的运用,对摩托车转弯半径的设计与测试提供了技术支持,能够减小最小转弯半径的测量误差,提高测量工作效率,此测量方法为后续摩托车转向角设计提供了有力的技术依据,同时,最小转弯半径的精确计算对摩托车转弯时的最小通过半径提供了理论依据。

")



