・上一文章:ZBY-2型糯玉米播种机的研制
・下一文章:非道路柴油机共轨技术及电器故障案例分析
3 机具姿态综合探测
机具姿态综合探测的基本原理是先测量提升臂的转动角度,再由转动角度和耕深的拟合曲线间接测量耕深。提升臂转动角度的测量可分为两种形式:一是由悬挂机构的几何关系,通过数学公式推导,由液压缸活塞位移量间接测量提升臂的转动角度;二是利用传动机构直接测量提升臂的转动角度。
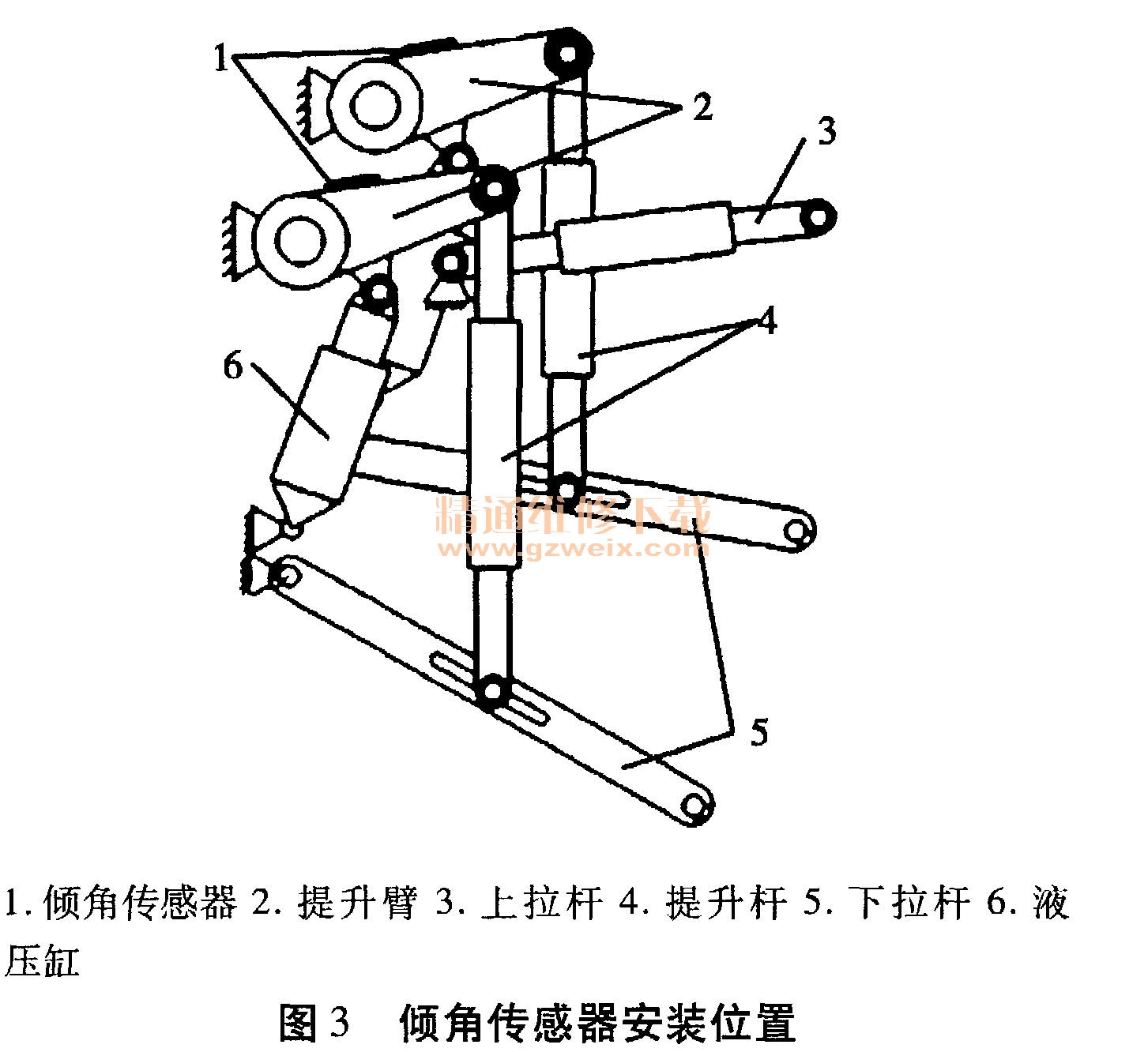
间接测量(如图3所示),以倾角传感器测量提升臂水平倾角,然后根据三点式悬挂机构的几何关系推导出耕深。倾角传感器安装在提升臂上。挂接好农具后,调节杆件使农具至最大耕作深度时机架横梁处于水平位置,运用Matlab仿真计算,测量计算不同深度的耕深,液压缸活塞位移与悬挂连接农具耕作深度之间的拟合曲线,然后根据提升臂水平角度计算出提升臂液压缸活塞位移。从而间接计算出耕深。
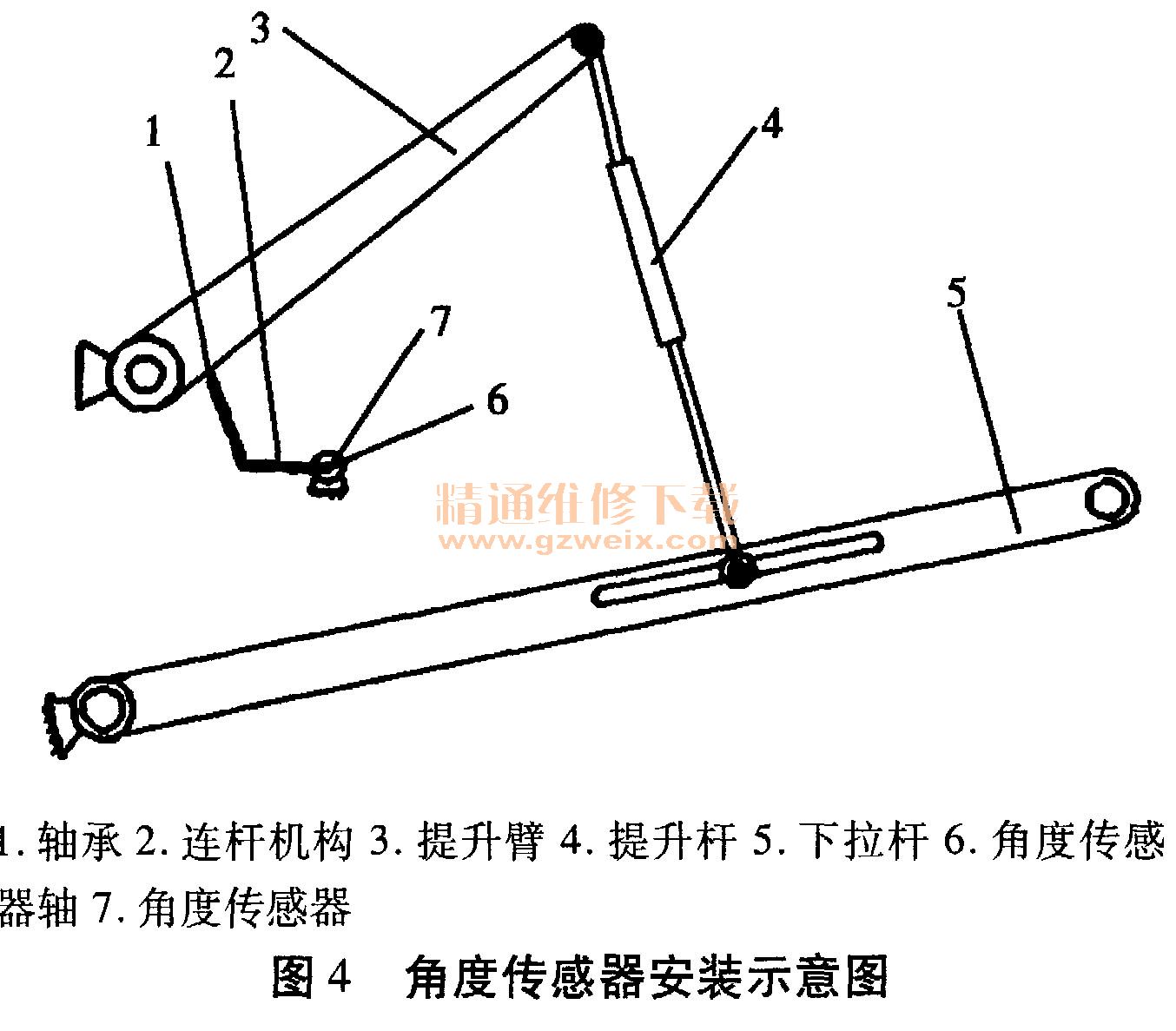
直接测量(如图4所示),固定在拖拉机上的角度传感器通过连杆机构和轴承与提升臂相连接,当耕深改变时,拖拉机的下拉杆随之上下运动,于是与下拉杆相连接的提升臂也会有一个相应的转角变化;同时角度传感器的转轴也在连杆的作用下随提升臂同步转动,根据角度传感器阻值的变化,再根据对应的几何关系所建立的数学模型间接测出此时的耕深。
4 结论
(1)超声波测量,需要加装镇压轮装置,把松软的土地表面压实,避免超声波测距传感器在松软的土壤上反射波信号微弱,无法进行准确可靠测量;同时也可以采用减小超声波测距盲区电路在不增加功率的前提下,提高超声波传感器的灵敏度。
(2)采用随地仿形装置,可通过调整随地仿形机构的连接部件,安装各种类型的深松机,安装方便,适用性强;但由于其工作原理,装置触土部件需长期与地面接触,装置相对容易发生故障或损坏;其设备体积大,安装不方便。
(3)机具姿态综合探测,测量机架与地面的角度的变化,其设备体积小,便于安装;不受粉尘和雨水影响可以在恶劣环境中工作;能适用于各种地形深松作业,不受机具震动和地形颠簸影响;但其电路集成化程度高,价格相对昂贵同时不方便农民维修。





