来源:汽车维修与保养 作者:佚名 2021-10-16 10:04:00
三、A DAS系统的结构
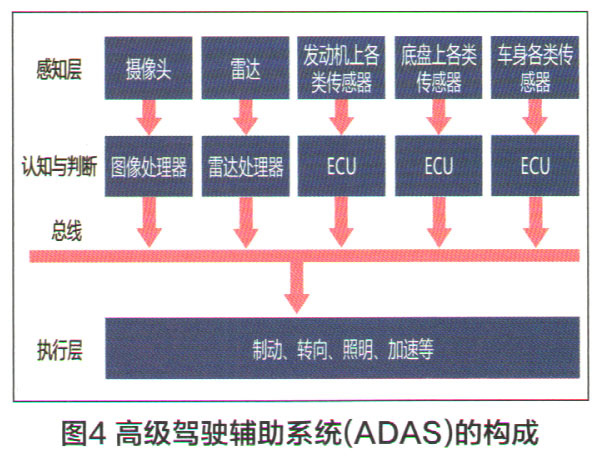
如图4所示,ADAS系统有三个部分构成,分别是感知层、认知与判断层、执行层。感知层硬件包括雷达、摄像头等传感器,用于探测汽车周围的环境信息,为其他两个功能模块提供信息支持。认知与判断层涉及算法、应用软件与芯片。摄像头、雷达等ADAS传感器测量到的数据,还要与发动机、底盘、车身上的其他各类传感器测量到的数据配合。不同处理器处理的信息通过总线通信,最后给执行层发出指令。执行层则对应电子刹车、电子助力转向、电子车身稳定系统等。
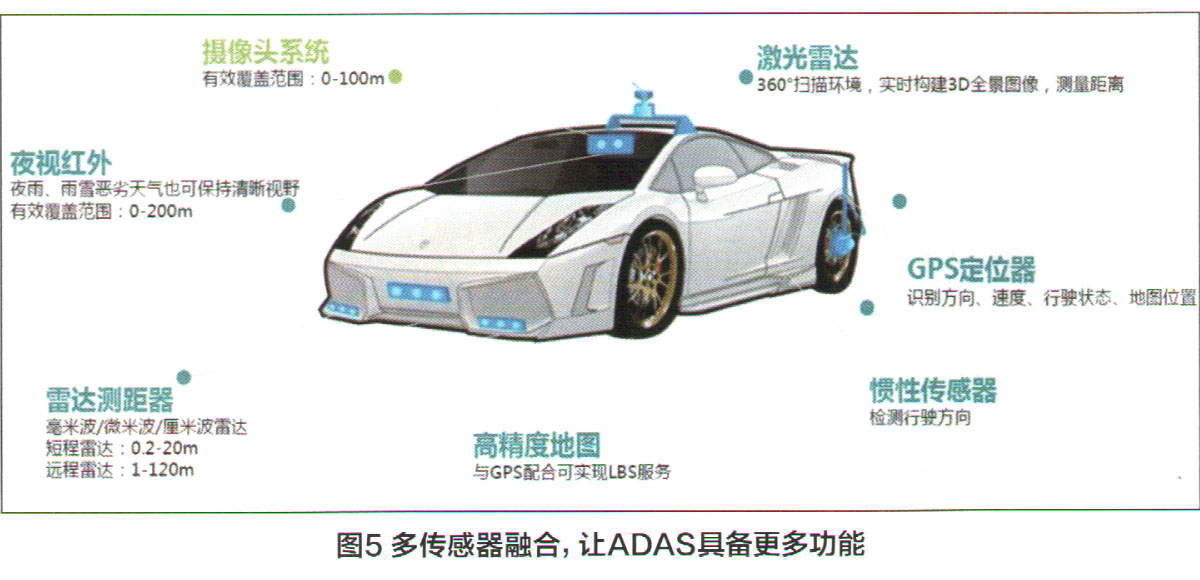
如图5所示,ADAS的传感器主要有超声波雷达、毫米波雷达、激光雷达、摄像头4类。不同传感器的原理和功能各不相同,能在不同的场景中发挥各自的优势,因此目前难以相互替代。
1.超声波雷达
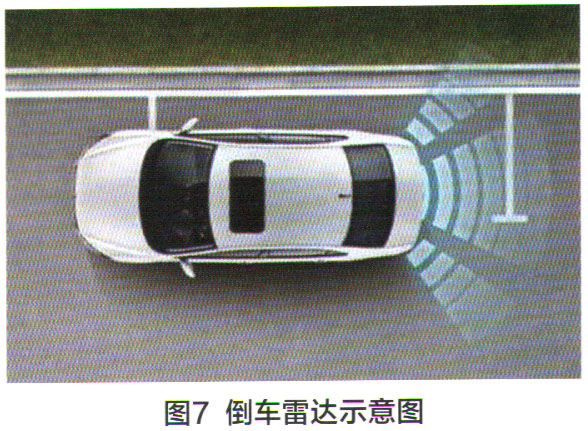
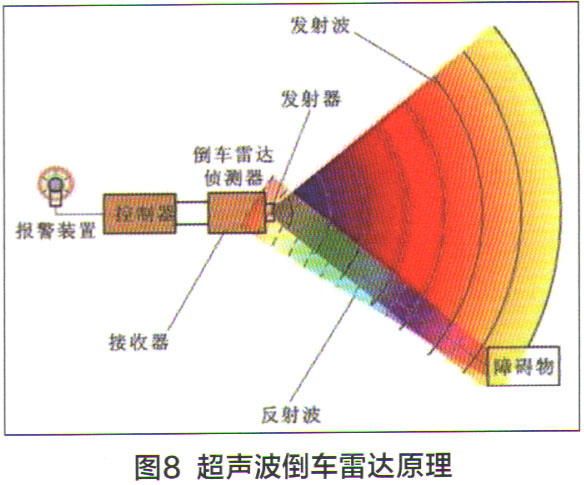
超声波雷达(图6)是泊车系统中最常用的传感器。超声波雷达是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。目前,常用探头的工作频率有40kHz、48kHz和58kHz三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故一般采用40kHz的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。图7、图8所示为倒车雷达原理及工作示意图,其探测范围在0.1-3米之间,而且精度较高,因此非常适合应用于泊车。
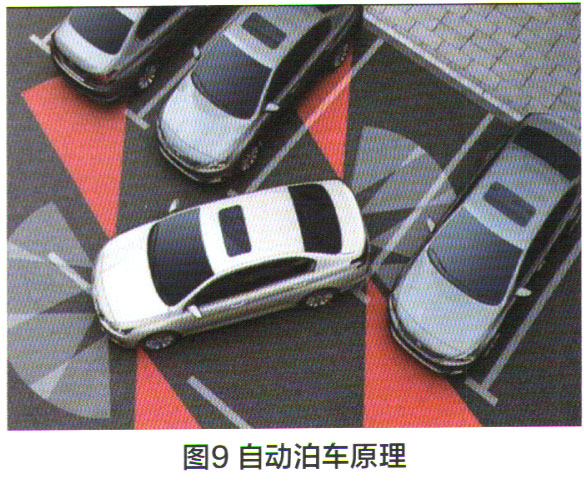
如图9所示,通常一套汽车倒车雷达需要安装4个超声波传感器,而自动泊车系统是在倒车雷达系统的基础上再增加4个超声波驻车辅助(Ultrasonic Parking Assistant)超声波传感器和4个自动泊车辅助(Automatic Parking Assistant)超声波传感器。
2.毫米波雷达
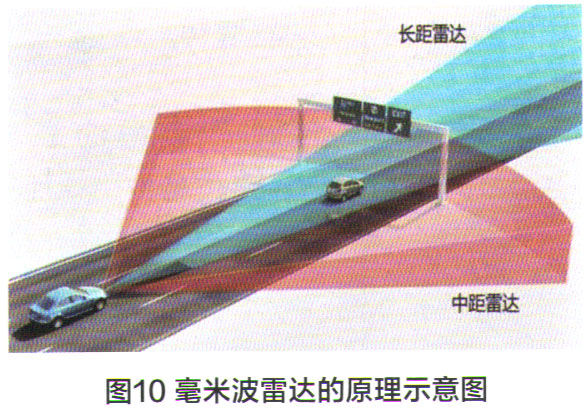
如图10所示,毫米波雷达发射毫米波段的电磁波,利用障碍物反射波的时间差确定障碍物距离,利用反射波的频率偏移确定相对速度。毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的优点。其缺点是无法识别物体颜色;视场角较小,需要多个雷达组合使用;行人的反射波较弱,难以识别。目前市场上主流的车载毫米波雷达频段为24GHz(用于短中距离雷达,15-30m)和77GHz(用于长距离雷达,100-200m)。但是77GHz在性能和体积上都更具优势,77GHz的距离分辨率更高,体积比24GHz产品小了三分之一。
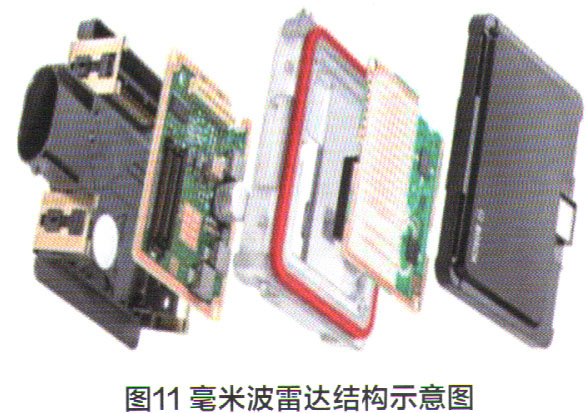
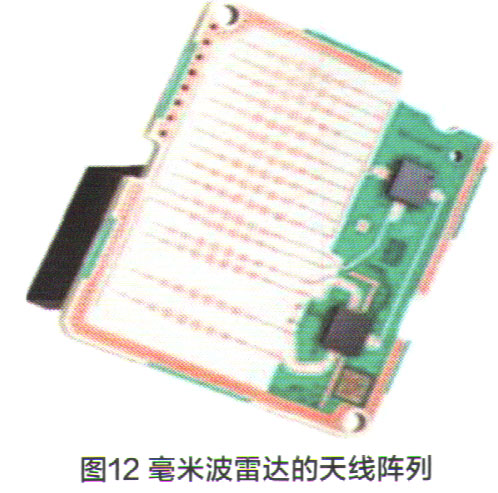
毫米波雷达主要由天线、射频MMIC、基带信号处理三部分组成。现在的毫米波雷达(图11、图12)采用“微带贴片天线”使得天线体积更小、重量更轻。雷达射频前端单片微波集成电路(MMIC)用于产生和接收射频信号。数字处理包括阵列天线的波束形成算法、信号检测、测量算法、分类和跟踪算法等。
3.激光雷达
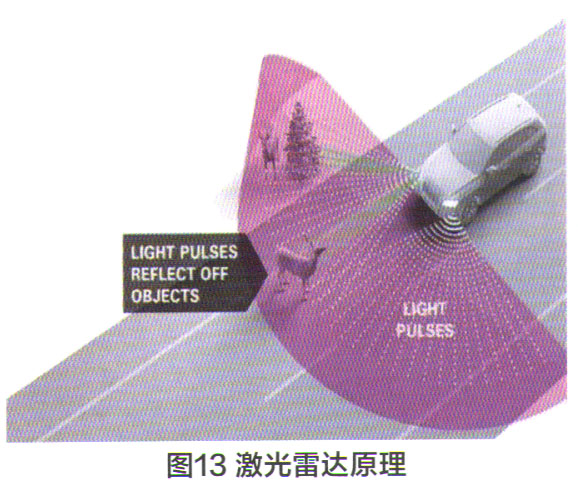
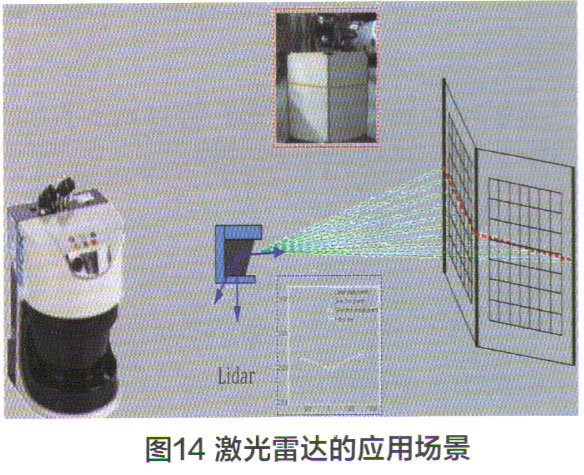
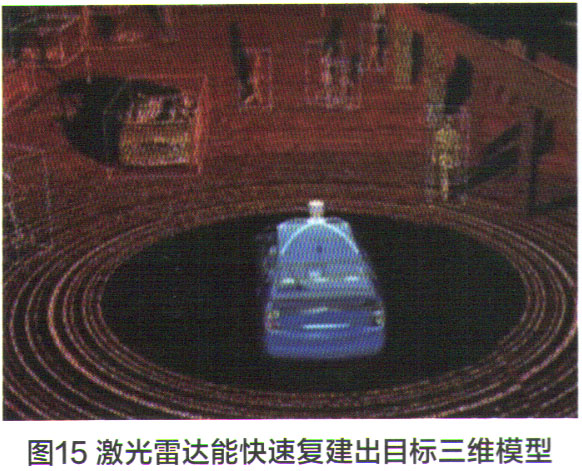
如图13所示,车载激光雷达又称车载三维激光扫描仪,通过发射和接受返回的激光束,分析激光遇到目标后的折返时间,计算出目标与车的距离(图14)。通过这种方法,搜集目标表面大量的密集点的三维坐标、反射率等信息,能快速复建出目标的三维模型(图15)及各种图件数据,建立三维点云图,绘制出环境地图,以达到环境感知的目的。目前市场上比较常见的有8线、16线和32线激光雷达,还有少量64线产品。激光雷达线束越多,测量精度越高,安全性也越高,但是成本也越高。
和超身波雷达和毫米波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率,且探测精度高、探测范围广;抗干扰能力强;能实时获取的信息量比较丰富,可直接获取目标的距离、角度、反射强度、速度等信息,从而生成目标多维度图像。但是激光雷达却很容易受天气的影响,比如在雨雪、大雾等天气条件下,其探测性能就会变的较差。
上一页 [1] [2] [3]

")
")
")
")

