・上一文章:奥迪Q7,3.6的排量,1000km烧1L机油,换个废气阀能解决吗?
・下一文章:电控发动机进气系统及其真空泄漏对发动机的影响
二、功能介绍
碰撞预防辅助系统增强版对驾驶员的辅助分为两个阶段。
1.距离警告阶段:A90计算与前车之间的距离和可能发生碰撞之前的时间,并区分两种车距警告。并且驾驶员无法主动对这些警告输出进行确认,只有在状况解除之后,警告才会取消。
(1)静态车距警告:在交通畅通的情况下,如果本车与前车之间的车距使行驶所需时间小于0.8s,且这种危险的车距保持3s以上(例如车速为100km/h,车距约为22.2m时),仅通过视觉方式输出静态车距警告。
(2)碰撞临界车距警告:如果雷达传感器探测范围内的障碍物被归类为存在事故危险(将在2.6s内发生碰撞)的障碍物,通过视觉和声讯方式输出碰撞临界车距警告。
2.制动系统干预阶段:该过程又根据驾驶员对警告信息的反应分为两种情况。
(1)制动辅助系统的功能顺序:如果驾驶员通过紧急制动操作对距离警告做出反应,则制动系统为其提供辅助,以便充分利用与障碍物之间的制动距离。如果碰撞不可避免,则除了制动系统会进行干预外,还会采取驾驶员及乘客保护措施。
(2)自动部分制动的功能顺序:如果驾驶员在存在事故危险的情况下未对警告做出反应,则A90会启用自动部分制动功能,向ESP控制单元传递所需的制动扭矩请求(最大减速度约为6m/s2) ;此外,还向ME控制单元传递减小发动机扭矩请求。在该过程中,A90同时考虑以下变量:与车辆或障碍物的相对速度;与车辆或障碍物之间的距离。
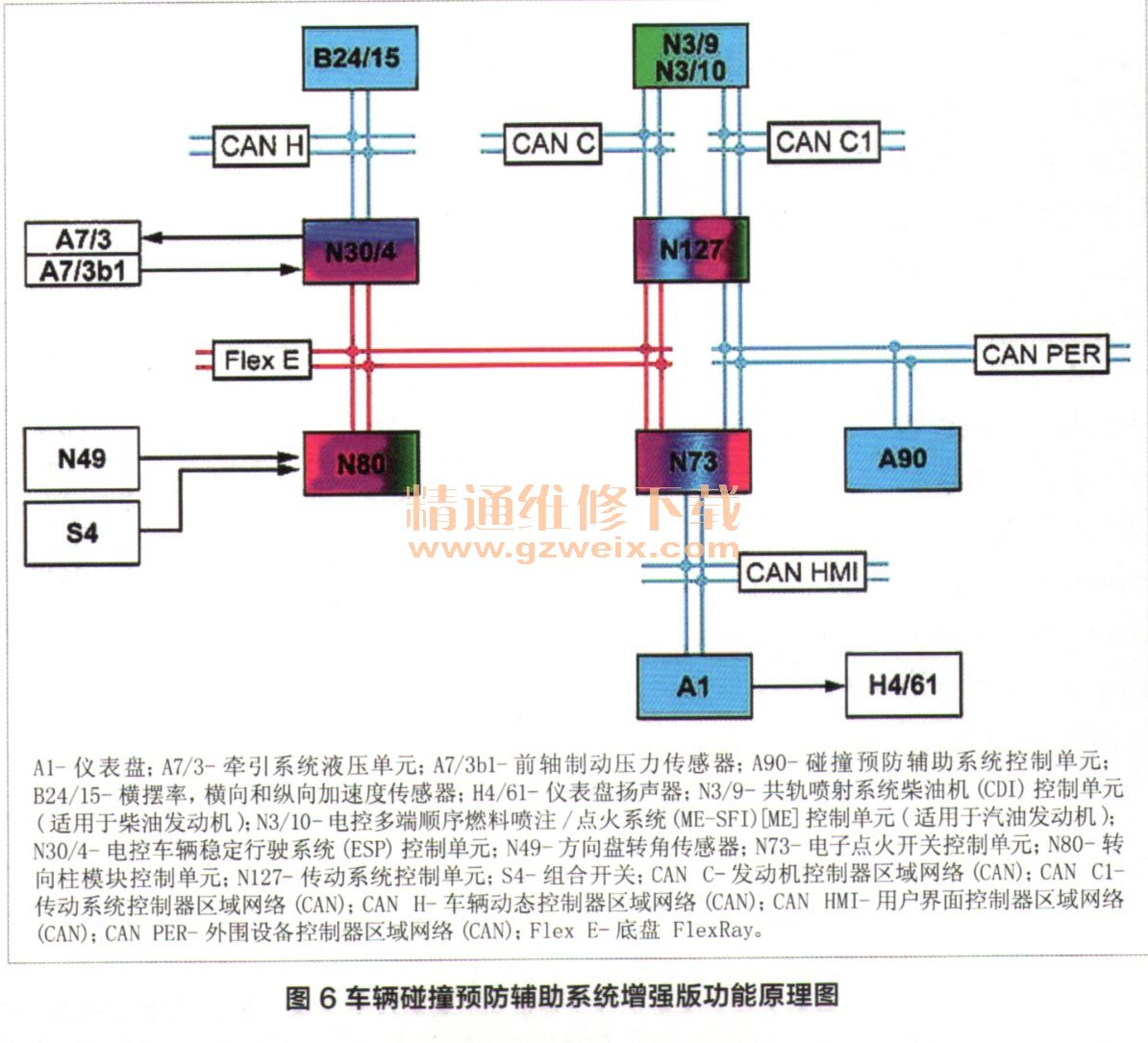
三、系统原理
整个车辆碰撞预防辅助系统可通过图6来加深理解:CAN总线具有双向性,既能传输又能接收信息;N73作为中央网关构成了Flex ray与CAN B的数据接口,不同CAN网络之间的通信需要借助N73来完成,即N73确定信号优先权和转换为CAN信号类型;箭头指向代表信号的传输方向或控制方向,如A90综合评估自身传感器及网络中传来的信号进行分析,以计算出可能的碰撞风险值,然后A90将制动干预请求通过Flex E传输给N30/4,由N30/4触动A7/3实施相应的制动。
")
")
")
")

