・上一文章:标志307音响改装
・下一文章:奥迪A6L发动机故障灯点亮
倒车雷达工作原理如图7所示。此设计中BCM和倒车雷达传感器之间的工作关系如下:LIN通信执行LIN2.0协议;波特率要求19 200 b/s;周期为120 ms;左探头LIN ID为0x03;左中探头LIN ID为0x04;右中探头LIN ID为0x05;右探头LIN ID为0x06;探头发送数据的字节数为1。

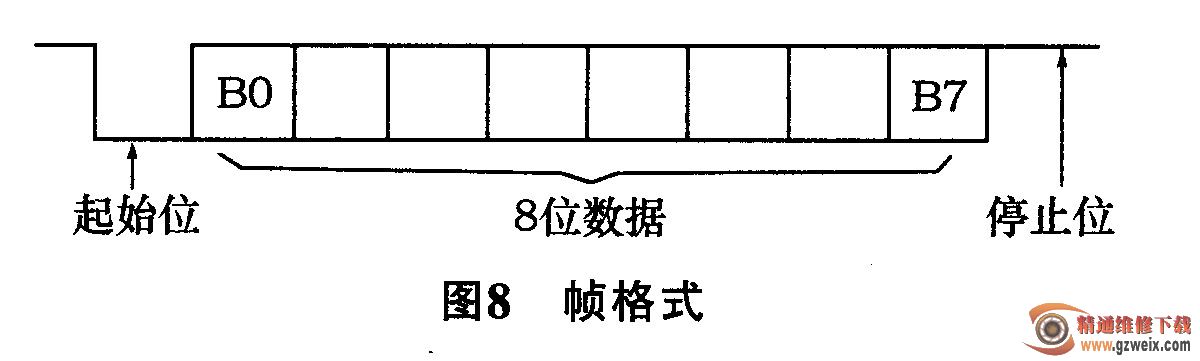
1) LIN传输时序图:异步UART, 8 bit数据,1 bit停止位,无奇偶校验,通信速率19 200 b/s
2)帧格式如图8所示。
3) ID自动分配与探头自检:倒车档接通,探头上电后开始初始化,初始化完成后开始对探头自诊断,自诊断完成后等待接收ID, BCM在倒车档接通后等待100 ms发送左探头ID给探头,探头接收到ID后将诊断数据发送给BCM,诊断数据发送完成后,探头存储此ID作为自己探头的ID,同时开通探头V+引脚,提供左中探头电源,BCM接收到探头的左探头诊断数据后保存;左中探头电源接通后执行和左探头同样的工作,依次向后传递。探头ID自动分配完成,若在ID自动分配中出现探头不响应LIN报文头,ID自动分配停止,BCM进行报错显示,若探头响应的数据为探头自诊断错误,ID自动分配继续进行,等待完成ID自动分配后BCM显示探头故障信息。
4)自诊断数据定义:自诊断数据包含在1字节的数据中,8 Bit中每个Bit所包含的含义按表4描述。
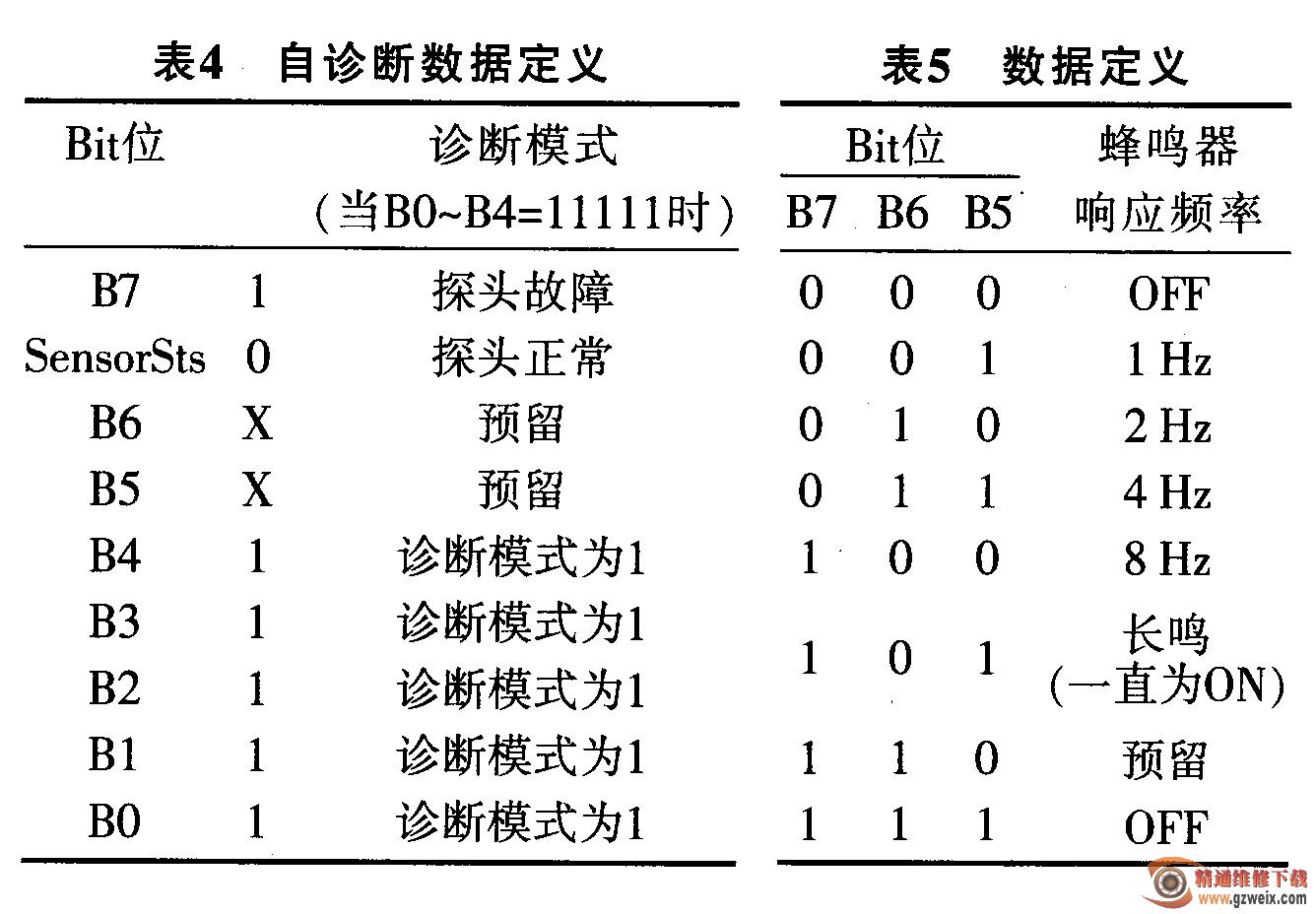
5)障碍物距离数据定义:障碍物距离数据包含在1字节的数据中,8 Bit中每个Bit所包含的含义按表5描述,其中BO-B4为距离信息,BCM不需要控制。
6) BCM执行输出:先分别采集4个探头的蜂鸣器鸣叫频率,哪个探头的鸣叫频率最高按照哪个进行鸣叫,在接收到第5个探头鸣叫频率后将第1个距离抛掉,第2-5个探头进行比较,哪个探头的鸣叫频率最高按照哪个进行鸣叫,依次类推。
3结论
此BCM是基于CAN总线和LIN总线的一款车身控制器。其在硬件设计和软件策略设计中都采用了较多的先进技术,采用双电源确保系统的正常工作;设置簸行回家功能:在BCM失效的情况下能够实现刮水器的低速工作,近光灯的正常工作等,确保失效后的安全性能;硬件设计能够对灯具等输出负载进行相应的故障诊断,储存相应的DTC,能够通过CAN信号进行故障代码的读取,提高了诊断和维修的效率。
采用基于CAN网络的BCM设计,能够尽可能地采用网络上的信号进行相关的软件设计,进行控制策略的优化和提升,同时也可以把BCM本身的相关信息发送到网络上供其它节点使用,提高了整车系统的可靠性和稳定性。
BCM对刮水电动机和闭锁电动机进行热保护,加上电动机本身的热保护,有效地提升了电动机的使用寿命,提高了整车相关零部件的性能。同时,各种合理优化的功能逻辑设计也提升了产品的舒适性,对整车的电器件的使用人性化有了较大的提高。
")
")
")
")

