・上一文章:分析及检修丰田卡罗拉1.6GL双可变气门正时系统(三)
・下一文章:检验及维修汽车制动系统的技术
如图 9 所示,ACC 传感器的校准需要四轮定位设备和 ACC 校准设备需要配合使用。车辆行驶轴线使用车轮定位测试仪和 ACC 调整设备VAS604测1定。在 VAS6041 上,在车距控制传感器的高度安装了一个激光瞄准器。在激光瞄准器和车距控制传感器之间安装了一个目标盘。目标盘上有一个中心孔,激光光束穿过该孔照在车距控制传感器的校准镜上。在调整底盘时,将试验台的测量装置调整为与行驶轴线平行。利用安装在 ACC 调整装置上的前轴测量接收器以及后轴上的其他测量接收器,将ACC 调整装置调整到与行驶轴线对齐。
激光发射器发出的激光束,穿过目标盘照在 ACC 传感器的校准镜上,然后被反射回目标盘上,测量装置必须调整为和车辆的行驶轴线平行,前部的测量数据记录器延伸到图9 显示的车辆轴距的位置。
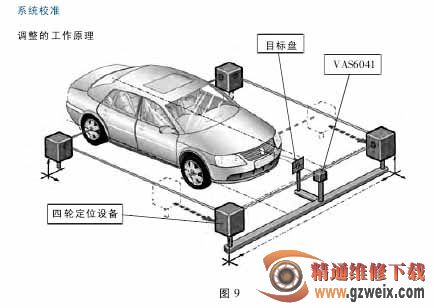
ACC 传感器校准镜和目标盘之间的距离必须是 1145mm。如果在点火开关打开的情况下在车辆前面进行一些维修操作,那么应该关闭雷达的功能,完成维修操作后,需要再次通过导航程序激活雷达的功能。
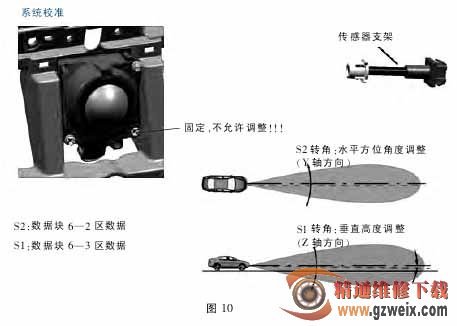
如图 11所示,由于生 产 原 因 ,镜面法线和探测区域的中心线 (雷达 法 线)不重合。在水平面和垂直面内的方向偏差在制造厂 测 定 ,并保存在传感器的内存中作 为 修 正值。指示误差用调整螺钉的槽口数量 来 表 示 。修正值可以用 VAS 测试 仪 输 出 。一旦用修正值 调 整 后 ,激光线束从中心移入一个象限内。 为了检查调整螺钉已经沿正确方向旋紧,目标象限也保存在传感器内存中。在功能引导或故障引导中,测量值能够被自动读出,并需要被转换成相应轴线上的毫米数值。当 ACC 系统需要校准,在调整传感器时,如果 3 个螺钉固定的传感器支架被分开了,那么这3 个支架必须更换(见图 10)。在水平面内,要求有较高的调整准确性。借助螺钉只能进行粗调。在车辆行驶过程中,利用电子设备在传感器内进行微调。
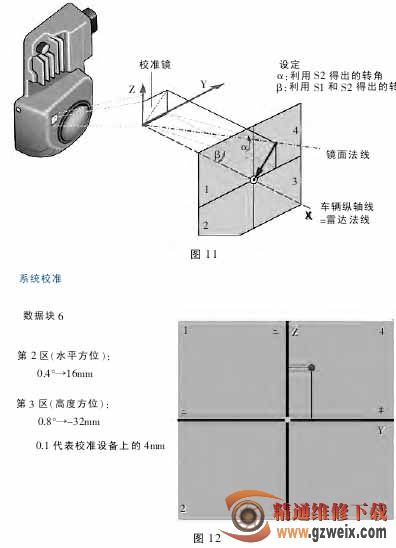
进入地址码 13,测量数据块(数据块 6,注意从 ACC 传感器上的校准镜到测量板的距离是 1145+5mm。)其中 2 区表示 AZOF 镜子在水平面内方向偏差(AZOF = 方位角偏差);3 区表示 ELOF 镜子在垂直面内方向偏差(ELOF = 仰角偏差)。
在数据块 6 中,高度和水平方向上的设定值以角度值显示出来,对于ACC 校准,2 区和 3 区是有用的(见图 12)。因为 0.1°的偏差 =被反射激光束的 4mm 的偏移量(用角度值乘以 40 得到目标盘毫米值)。在调整电机上,水平方向上的正值在 Z 轴右边,负值在左边(从行驶方向看);垂直方向上的正值在 Y 轴下边,负值在上边(从行驶方向看)。最后根据提示,在目标盘上标记计算值,并调整雷达固定支架调整螺钉,使得反射激光束达到标记值。
")
")
")
")

